 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArticulatedGS: Self-supervised Digital Twin Modeling of Articulated Objects using 3D Gaussian Splatting
Mar 11, 2025



We tackle the challenge of concurrent reconstruction at the part level with the RGB appearance and estimation of motion parameters for building digital twins of articulated objects using the 3D Gaussian Splatting (3D-GS) method. With two distinct sets of multi-view imagery, each depicting an object in separate static articulation configurations, we reconstruct the articulated object in 3D Gaussian representations with both appearance and geometry information at the same time. Our approach decoupled multiple highly interdependent parameters through a multi-step optimization process, thereby achieving a stable optimization procedure and high-quality outcomes. We introduce ArticulatedGS, a self-supervised, comprehensive framework that autonomously learns to model shapes and appearances at the part level and synchronizes the optimization of motion parameters, all without reliance on 3D supervision, motion cues, or semantic labels. Our experimental results demonstrate that, among comparable methodologies, our approach has achieved optimal outcomes in terms of part segmentation accuracy, motion estimation accuracy, and visual quality.
Asynchronous Collaborative Autoscanning with Mode Switching for Multi-Robot Scene Reconstruction
Oct 10, 2022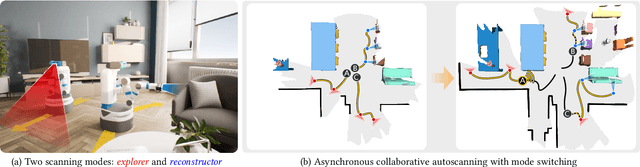
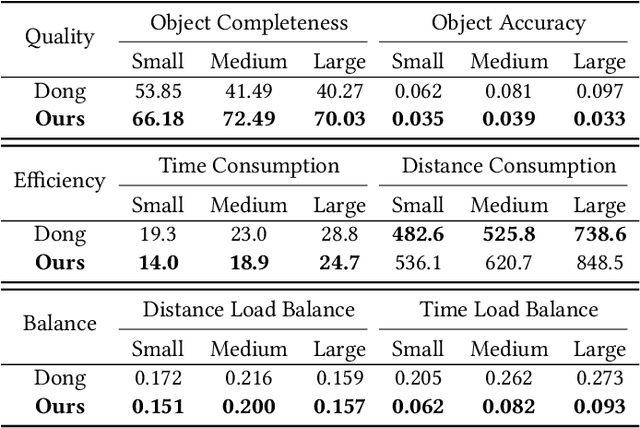
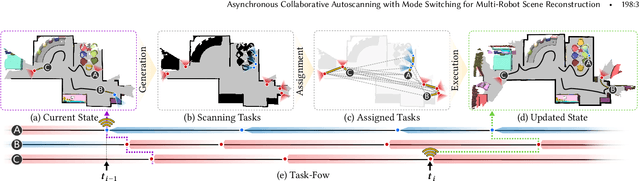
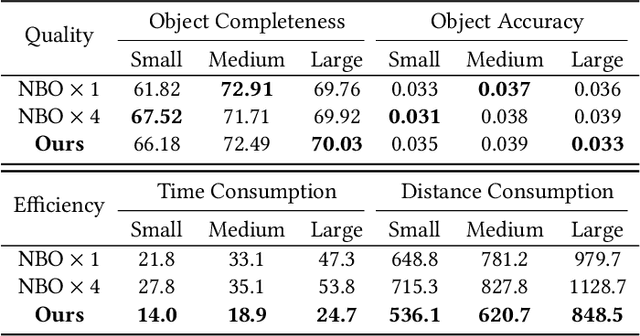
When conducting autonomous scanning for the online reconstruction of unknown indoor environments, robots have to be competent at exploring scene structure and reconstructing objects with high quality. Our key observation is that different tasks demand specialized scanning properties of robots: rapid moving speed and far vision for global exploration and slow moving speed and narrow vision for local object reconstruction, which are referred as two different scanning modes: explorer and reconstructor, respectively. When requiring multiple robots to collaborate for efficient exploration and fine-grained reconstruction, the questions on when to generate and how to assign those tasks should be carefully answered. Therefore, we propose a novel asynchronous collaborative autoscanning method with mode switching, which generates two kinds of scanning tasks with associated scanning modes, i.e., exploration task with explorer mode and reconstruction task with reconstructor mode, and assign them to the robots to execute in an asynchronous collaborative manner to highly boost the scanning efficiency and reconstruction quality. The task assignment is optimized by solving a modified Multi-Depot Multiple Traveling Salesman Problem (MDMTSP). Moreover, to further enhance the collaboration and increase the efficiency, we propose a task-flow model that actives the task generation and assignment process immediately when any of the robots finish all its tasks with no need to wait for all other robots to complete the tasks assigned in the previous iteration. Extensive experiments have been conducted to show the importance of each key component of our method and the superiority over previous methods in scanning efficiency and reconstruction quality.
* 13pages, 12 figures, Conference: SIGGRAPH Asia 2022