 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlight through Narrow Gaps with Morphing-Wing Drones
Mar 12, 2026The size of a narrow gap traversable by a fixed-wing drone is limited by its wingspan. Inspired by birds, here, we enable the traversal of a gap of sub-wingspan width and height using a morphing-wing drone capable of temporarily sweeping in its wings mid-flight. This maneuver poses control challenges due to sudden lift loss during gap-passage at low flight speeds and the need for precisely timed wing-sweep actuation ahead of the gap. To address these challenges, we first develop an aerodynamic model for general wing-sweep morphing drone flight including low flight speeds and post-stall angles of attack. We integrate longitudinal drone dynamics into an optimal reference trajectory generation and Nonlinear Model Predictive Control framework with runtime adaptive costs and constraints. Validated on a 130 g wing-sweep-morphing drone, our method achieves an average altitude error of 5 cm during narrow-gap passage at forward speeds between 5 and 7 m/s, whilst enforcing fully swept wings near the gap across variable threshold distances. Trajectory analysis shows that the drone can compensate for lift loss during gap-passage by accelerating and pitching upwards ahead of the gap to an extent that differs between reference trajectory optimization objectives. We show that our strategy also allows for accurate gap passage on hardware whilst maintaining a constant forward flight speed reference and near-constant altitude.
Model Predictive Loitering and Trajectory Tracking of Suspended Payloads in Cable-Driven Balloons Using UGVs
Jun 07, 2022
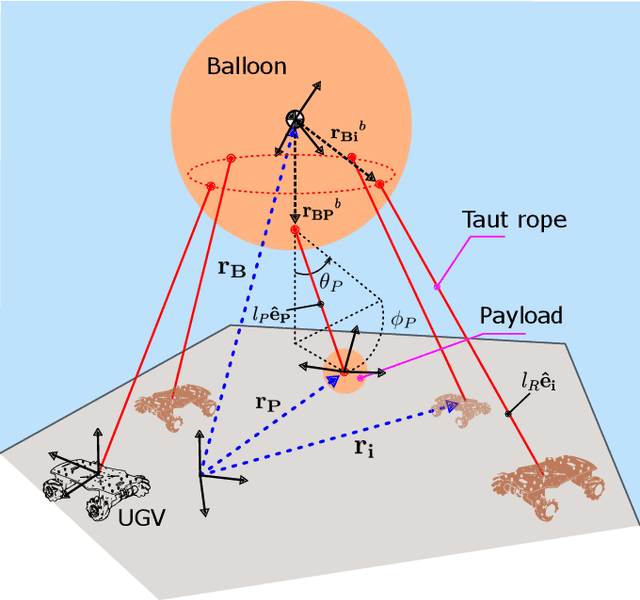

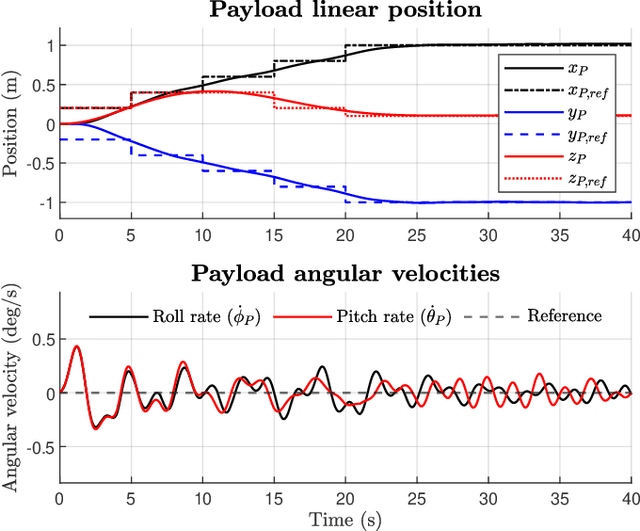
The feasibility of performing airborne and ground manipulation, perception, and reconnaissance using wheeled rovers, unmanned aerial vehicles, CubeSats, SmallSats and more have been evaluated before. Among all of these solutions, balloon-based systems possess merits that make them extremely attractive, e.g., a simple operation mechanism and endured operation time. However, there are many hurdles to overcome to achieve robust loitering performance in balloon-based applications. We attempt to identify design and control challenges, and propose a novel robotic platform that allows for the application of balloons in the reconnaissance and perception of Mars craters. This work briefly covers our suggested actuation and Model Predictive Control design framework for steering such balloon systems. We propose the coordinated servoing of multiple unmanned ground vehicles (UGVs) to regulate tension forces in a cable-driven balloon to which an underactuated hanging payload is attached.