 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlying Together: Human-Guided Immersive Shared Control for Aerial Robot Teams in Unknown Environments
May 20, 2026While autonomous multi-robots can achieve safe and coordinated navigation, they often struggle to adapt to unforeseen conditions and to capture operator-driven objectives in unstructured environments. We present a Virtual Reality (VR)-based shared control framework for teams of drones operating in constrained and unknown environments, enabling real-time, user-guided exploration. At the core of our approach is a novel, user-guided motion-primitive-based planner that computes continuous, collision-free trajectories while continuously integrating operator input. This planner is coupled with an admittance controller, allowing the operator to flexibly influence team behavior and guide drones toward regions of interest that autonomous planners may overlook. The system supports mixed-reality operations with both physical and simulated drones, and implements a bilateral VR-based interface, allowing the operator to guide the robot team via migration points while receiving immediate visual feedback of the team state. Experimental results show that shared control improves obstacle avoidance, maintains inter-agent spacing, and reduces operator effort, demonstrating the feasibility and advantages of immersive, human-in-the-loop multi-robot navigation.
Accurate Trajectory Tracking with MPCC for Flapping-Wing MAVs
May 07, 2026Flapping-wing micro aerial vehicles offer quieter and safer operation than rotary-wing drones, yet achieving precise autonomous control of bird-scale ornithopters remains challenging: lift, airspeed, and turning authority are tightly coupled and governed by only a few control inputs. Conventional cascaded controllers treat altitude, speed, and heading independently, producing persistent tracking errors during complex maneuvers, while time-parameterized trajectory tracking requires predefined speed profiles that existing methods cannot robustly produce for these coupled dynamics. We address both limitations simultaneously with a Model Predictive Contouring Control (MPCC) approach that tracks arc-length-parameterized trajectories while optimizing progress online, eliminating the need for predefined timing. However, MPCC requires a dynamical model that captures the coupled aerodynamics without exceeding the computational budget of real-time nonlinear optimization. Here, we propose a compact, continuously differentiable model that captures the dominant couplings of bird-scale ornithopters, enabling real-time predictive control. We validated the method with the XFly ornithopter flying along circular and three-dimensional racing trajectories and achieved a mean deviation from the reference trajectory between 6.5 and 9 cm at speeds up to 3 m/s, which represents an almost 10-fold improvement over prior ornithopter control methods.
Flight through Narrow Gaps with Morphing-Wing Drones
Mar 12, 2026The size of a narrow gap traversable by a fixed-wing drone is limited by its wingspan. Inspired by birds, here, we enable the traversal of a gap of sub-wingspan width and height using a morphing-wing drone capable of temporarily sweeping in its wings mid-flight. This maneuver poses control challenges due to sudden lift loss during gap-passage at low flight speeds and the need for precisely timed wing-sweep actuation ahead of the gap. To address these challenges, we first develop an aerodynamic model for general wing-sweep morphing drone flight including low flight speeds and post-stall angles of attack. We integrate longitudinal drone dynamics into an optimal reference trajectory generation and Nonlinear Model Predictive Control framework with runtime adaptive costs and constraints. Validated on a 130 g wing-sweep-morphing drone, our method achieves an average altitude error of 5 cm during narrow-gap passage at forward speeds between 5 and 7 m/s, whilst enforcing fully swept wings near the gap across variable threshold distances. Trajectory analysis shows that the drone can compensate for lift loss during gap-passage by accelerating and pitching upwards ahead of the gap to an extent that differs between reference trajectory optimization objectives. We show that our strategy also allows for accurate gap passage on hardware whilst maintaining a constant forward flight speed reference and near-constant altitude.
ChartComplete: A Taxonomy-based Inclusive Chart Dataset
Jan 16, 2026With advancements in deep learning (DL) and computer vision techniques, the field of chart understanding is evolving rapidly. In particular, multimodal large language models (MLLMs) are proving to be efficient and accurate in understanding charts. To accurately measure the performance of MLLMs, the research community has developed multiple datasets to serve as benchmarks. By examining these datasets, we found that they are all limited to a small set of chart types. To bridge this gap, we propose the ChartComplete dataset. The dataset is based on a chart taxonomy borrowed from the visualization community, and it covers thirty different chart types. The dataset is a collection of classified chart images and does not include a learning signal. We present the ChartComplete dataset as is to the community to build upon it.
Adaptive morphing of wing and tail for stable, resilient, and energy-efficient flight of avian-informed drones
Mar 13, 2024



Avian-informed drones feature morphing wing and tail surfaces, enhancing agility and adaptability in flight. Despite their large potential, realising their full capabilities remains challenging due to the lack of generalized control strategies accommodating their large degrees of freedom and cross-coupling effects between their control surfaces. Here we propose a new body-rate controller for avian-informed drones that uses all available actuators to control the motion of the drone. The method exhibits robustness against physical perturbations, turbulent airflow, and even loss of certain actuators mid-flight. Furthermore, wing and tail morphing is leveraged to enhance energy efficiency at 8m/s, 10m/s and 12m/s using in-flight Bayesian optimization. The resulting morphing configurations yield significant gains across all three speeds of up to 11.5% compared to non-morphing configurations and display a strong resemblance to avian flight at different speeds. This research lays the groundwork for the development of autonomous avian-informed drones that operate under diverse wind conditions, emphasizing the role of morphing in improving energy efficiency.
High-Speed Motion Planning for Aerial Swarms in Unknown and Cluttered Environments
Feb 29, 2024



Coordinated flight of multiple drones allows to achieve tasks faster such as search and rescue and infrastructure inspection. Thus, pushing the state-of-the-art of aerial swarms in navigation speed and robustness is of tremendous benefit. In particular, being able to account for unexplored/unknown environments when planning trajectories allows for safer flight. In this work, we propose the first high-speed, decentralized, and synchronous motion planning framework (HDSM) for an aerial swarm that explicitly takes into account the unknown/undiscovered parts of the environment. The proposed approach generates an optimized trajectory for each planning agent that avoids obstacles and other planning agents while moving and exploring the environment. The only global information that each agent has is the target location. The generated trajectory is high-speed, safe from unexplored spaces, and brings the agent closer to its goal. The proposed method outperforms four recent state-of-the-art methods in success rate (100% success in reaching the target location), flight speed (67% faster), and flight time (42% lower). Finally, the method is validated on a set of Crazyflie nano-drones as a proof of concept.
Decentralized Multi-Agent Planning for Multirotors: a Fully Online and Communication Latency Robust Approach
Apr 22, 2023



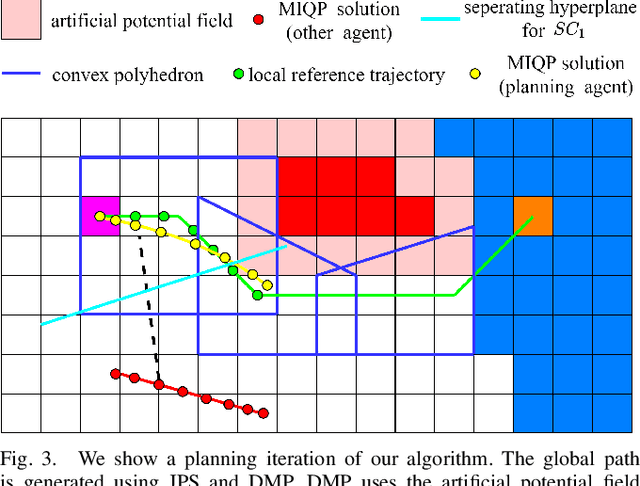
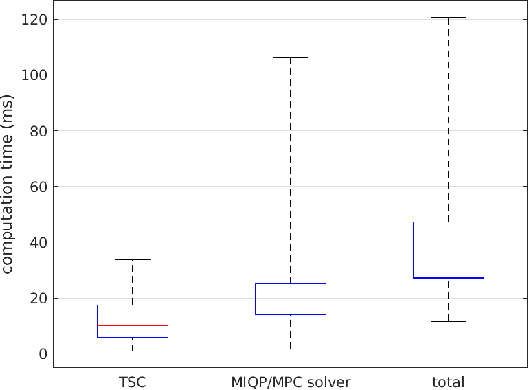
There are many industrial, commercial and social applications for multi-agent planning for multirotors such as autonomous agriculture, infrastructure inspection and search and rescue. Thus, improving on the state-of-the-art of multi-agent planning to make it a viable real-world solution is of great benefit. In this work, we propose a new method for multi-agent planning in a static environment that improves our previous work by making it fully online as well as robust to communication latency. The proposed framework generates a global path and a Safe Corridor to avoid static obstacles in an online fashion (generated offline in our previous work). It then generates a time-aware Safe Corridor which takes into account the future positions of other agents to avoid intra-agent collisions. The time-aware Safe Corridor is given with a local reference trajectory to an MIQP (Mixed-Integer Quadratic Problem)/MPC (Model Predictive Control) solver that outputs a safe and optimal trajectory. The planning frequency is adapted to account for communication delays. The proposed method is fully online, real-time, decentralized, and synchronous. It is compared to 3 recent state-of-the-art methods in simulations. It outperforms all methods in robustness and safety as well as flight time. It also outperforms the only other state-of-the-art latency robust method in computation time.
MACE: Multi-Agent Autonomous Collaborative Exploration of Unknown Environments
Aug 16, 2022
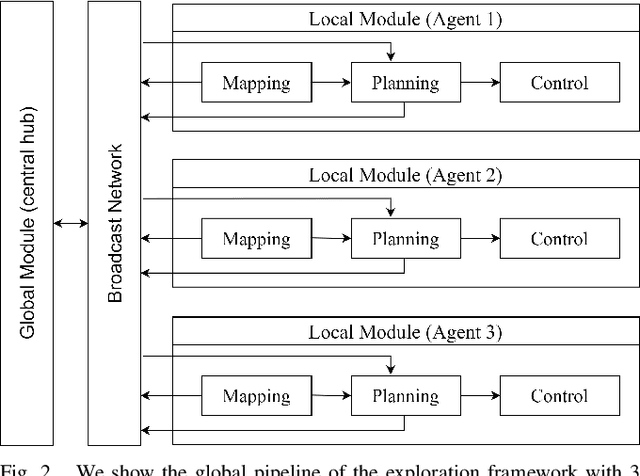

In this paper, we propose a new framework for multi-agent collaborative exploration of unknown environments. The proposed method combines state-of-the-art algorithms in mapping, safe corridor generation and multi-agent planning. It first takes a volume that we want to explore, then proceeds to give the multiple agents different goals in order to explore a voxel grid of that volume. The exploration ends when all voxels are discovered as free or occupied, or there is no path found for the remaining undiscovered voxels. The state-of-the-art planning algorithm uses time-aware Safe Corridors to guarantee intra-agent collision safety as well safety from static obstacles. The presented approach is tested in a state of the art simulator for up to 4 agents.
Multirotor Planning in Dynamic Environments using Temporal Safe Corridors
Aug 16, 2022
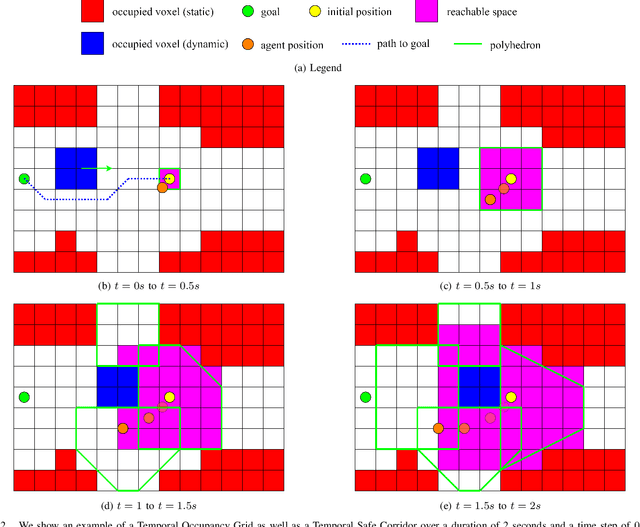
In this paper, we propose a new method for multirotor planning in dynamic environments. The environment is represented as a temporal occupancy grid which gives the current as well as the future/predicted state of all the obstacles. The method builds on previous works in Safe Corridor generation and multirotor planning to avoid moving and static obstacles. It first generates a global path to the goal that doesn't take into account the dynamic aspect of the environment. We then use temporal Safe Corridors to generate safe spaces that the robot can be in at discrete instants in the future. Finally we use the temporal Safe Corridors in an optimization formulation that accounts for the multirotor dynamics as well as all the obstacles to generate the trajectory that will be executed by the multirotor's controller. We show the performance of our method in simulations.
Shape-aware Safe Corridors Generation using Voxel Grids
Aug 16, 2022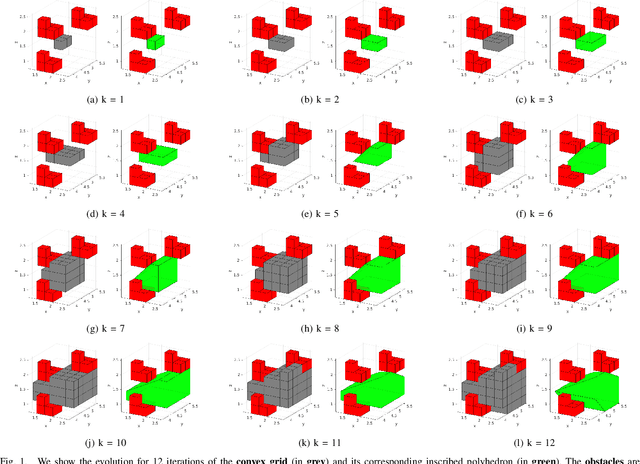
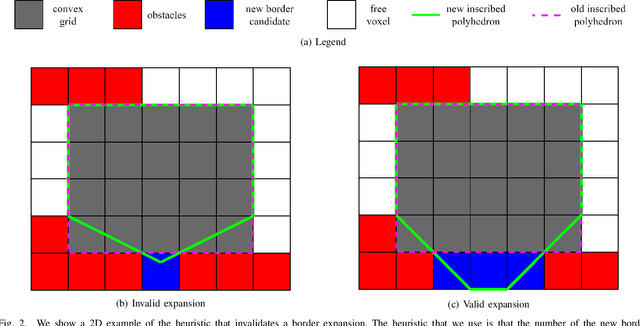
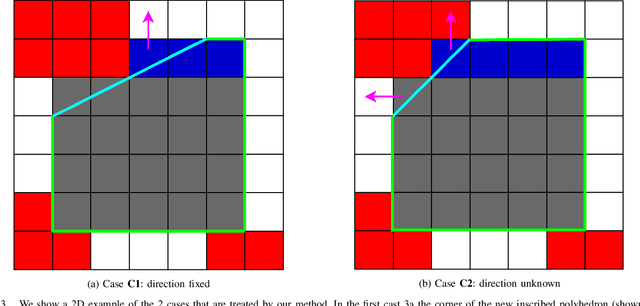
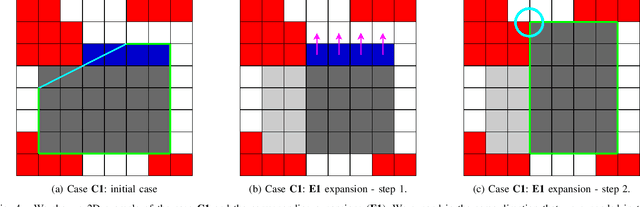
Safe Corridors (a series of overlapping convex shapes) have been used recently in multiple state-of-the-art motion planning methods. They allow to represent the free space in the environment in an efficient way for collision avoidance. In this paper, we propose a new framework for generating Safe Corridors. We assume that we have a voxel grid representation of the environment. The proposed framework improves on a previous state-of-the-art voxel grid based Safe Corridor generation method. It also creates a connectivity graph between polyhedra of a given Safe Corridor that allows to know which polyhedra intersect with each other. The connectivity graph can be used in planning methods to reduce computation time. The method is compared to other state-of-the-art methods in simulations in terms of computation time, volume covered, safety, number of polyhedron per Safe Corridor and number of constraints per polyhedron.