 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgetorchtune: PyTorch native post-training library
May 20, 2026Modern LLMs typically require multistage training pipelines to achieve strong downstream performance, with post-training serving as the main interface for adapting open-weight models. We introduce torchtune, a PyTorch-native library designed to streamline the post-training lifecycle of LLMs, enabling efficient fine-tuning, experimentation, and deployment-oriented workflows. Unlike many existing fine-tuning frameworks, which often optimize for ease of use, specialized recipes, or hardware efficiency at the cost of transparency and extensibility, torchtune emphasizes modularity, hackability, and direct access to the underlying PyTorch components. In this paper, we present the design principles behind torchtune, describe how they are reflected in its model builders, training recipes, and distributed training stack, and evaluate the library across representative post-training settings. We compare against popular fine-tuning frameworks, including Axolotl and Unsloth, and show that torchtune provides strong performance and memory efficiency across many settings while remaining flexible enough for rapid research iteration. These results position torchtune as a practical foundation for reproducible LLMs post-training research.
Machine-Assisted Script Curation
Jan 14, 2021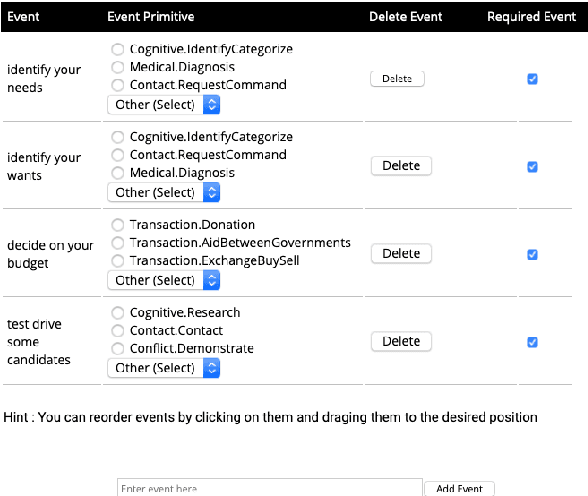
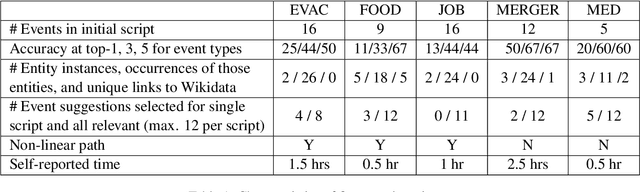
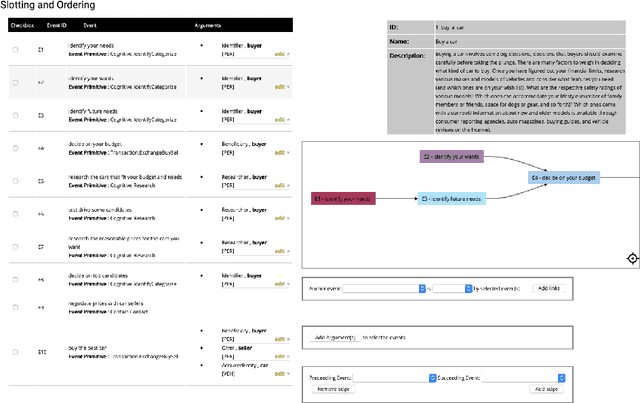
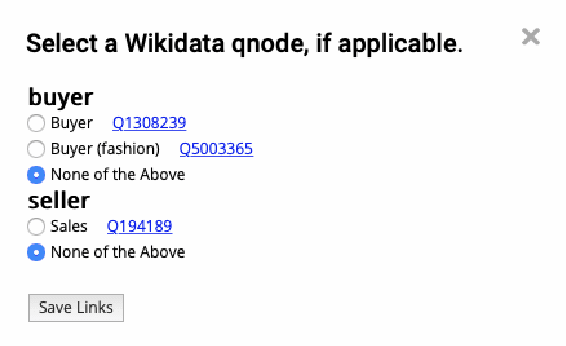
We describe Machine-Aided Script Curator (MASC), a system for human-machine collaborative script authoring. Scripts produced with MASC include (1) English descriptions of sub-events that comprise a larger, complex event; (2) event types for each of those events; (3) a record of entities expected to participate in multiple sub-events; and (4) temporal sequencing between the sub-events. MASC automates portions of the script creation process with suggestions for event types, links to Wikidata, and sub-events that may have been forgotten. We illustrate how these automations are useful to the script writer with a few case-study scripts.
Developing Computational Models of Social Assistance to Guide Socially Assistive Robots
Sep 14, 2019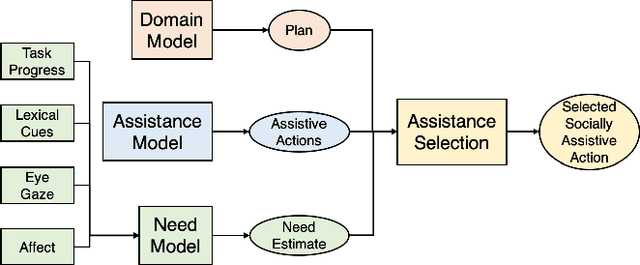
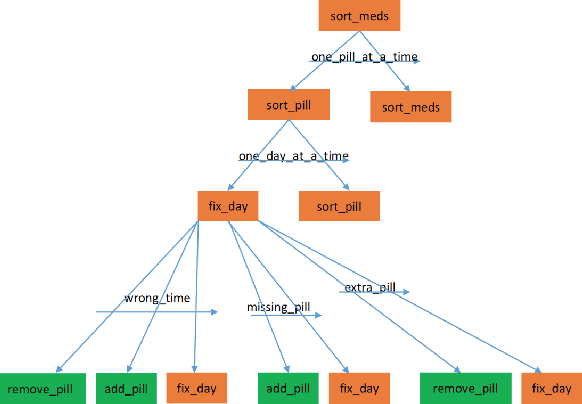
While there are many examples in which robots provide social assistance, a lack of theory on how the robots should decide how to assist impedes progress in realizing these technologies. To address this deficiency, we propose a pair of computational models to guide a robot as it provides social assistance. The model of social autonomy helps a robot select an appropriate assistance that will help with the task at hand while also maintaining the autonomy of the person being assisted. The model of social alliance describes how a to determine whether the robot and the person being assisted are cooperatively working towards the same goal. Each of these models are rooted in social reasoning between people, and we describe here our ongoing work to adapt this social reasoning to human-robot interactions.