 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Cooperative VRUs: Optimal Positioning Sampling for Pedestrian Awareness Messages
Dec 21, 2023



Road safety is the main motivation for Cooperative Intelligent Transport Systems (C-ITS) in general, and vehicular communications (V2X) technology in particular. The V2X-based Vulnerable Road User (VRU) protection is an approach that relies on the persistent broadcasting of "beacon" awareness messages by a VRU mobile device. To this end the European Telecommunications Standards Institute (ETSI) has specified the Vulnerable Road User Awareness Message (VAM) as well as the overall ITS-G5 protocol stack enabling a variety of the V2X applications. This article studies how often pedestrians (a type of VRU) should check their position to issue a VAM. To that end, we characterize the rate at which pedestrians generate VAMs leveraging a recognized mobility model, and formulate an optimization problem to minimize the time elapsed between VAMs. We propose an algorithm to solve the problem in 802.11p and assess its accuracy through numerical and simulation campaigns. Results evidence the accuracy of our VAM rate characterization, and evidence that we decrease ETSI positioning sampling rate by more than 30%. On top, our solution decreases the time between VAMs, and increases the packet delivery ratio. In other words, our approach increases the pedestrians safety while reducing the battery consumption of mobile devices.
A Deep RL Approach on Task Placement and Scaling of Edge Resources for Cellular Vehicle-to-Network Service Provisioning
May 16, 2023



Cellular-Vehicle-to-Everything (C-V2X) is currently at the forefront of the digital transformation of our society. By enabling vehicles to communicate with each other and with the traffic environment using cellular networks, we redefine transportation, improving road safety and transportation services, increasing efficiency of traffic flows, and reducing environmental impact. This paper proposes a decentralized approach for provisioning Cellular Vehicular-to-Network (C-V2N) services, addressing the coupled problems of service task placement and scaling of edge resources. We formalize the joint problem and prove its complexity. We propose an approach to tackle it, linking the two problems, employing decentralized decision-making using (i) a greedy approach for task placement and (ii) a Deep Deterministic Policy Gradient (DDPG) based approach for scaling. We benchmark the performance of our approach, focusing on the scaling agent, against several State-of-the-Art (SoA) scaling approaches via simulations using a real C-V2N traffic data set. The results show that DDPG-based solutions outperform SoA solutions, keeping the latency experienced by the C-V2N service below the target delay while optimizing the use of computing resources. By conducting a complexity analysis, we prove that DDPG-based solutions achieve runtimes in the range of sub-milliseconds, meeting the strict latency requirements of C-V2N services.
V2N Service Scaling with Deep Reinforcement Learning
Feb 01, 2023



The fifth generation (5G) of wireless networks is set out to meet the stringent requirements of vehicular use cases. Edge computing resources can aid in this direction by moving processing closer to end-users, reducing latency. However, given the stochastic nature of traffic loads and availability of physical resources, appropriate auto-scaling mechanisms need to be employed to support cost-efficient and performant services. To this end, we employ Deep Reinforcement Learning (DRL) for vertical scaling in Edge computing to support vehicular-to-network communications. We address the problem using Deep Deterministic Policy Gradient (DDPG). As DDPG is a model-free off-policy algorithm for learning continuous actions, we introduce a discretization approach to support discrete scaling actions. Thus we address scalability problems inherent to high-dimensional discrete action spaces. Employing a real-world vehicular trace data set, we show that DDPG outperforms existing solutions, reducing (at minimum) the average number of active CPUs by 23% while increasing the long-term reward by 24%.
Choose, not Hoard: Information-to-Model Matching for Artificial Intelligence in O-RAN
Aug 01, 2022



Open Radio Access Network (O-RAN) is an emerging paradigm, whereby virtualized network infrastructure elements from different vendors communicate via open, standardized interfaces. A key element therein is the RAN Intelligent Controller (RIC), an Artificial Intelligence (AI)-based controller. Traditionally, all data available in the network has been used to train a single AI model to use at the RIC. In this paper we introduce, discuss, and evaluate the creation of multiple AI model instances at different RICs, leveraging information from some (or all) locations for their training. This brings about a flexible relationship between gNBs, the AI models used to control them, and the data such models are trained with. Experiments with real-world traces show how using multiple AI model instances that choose training data from specific locations improve the performance of traditional approaches.
FoReCo: a forecast-based recovery mechanism for real-time remote control of robotic manipulators
May 09, 2022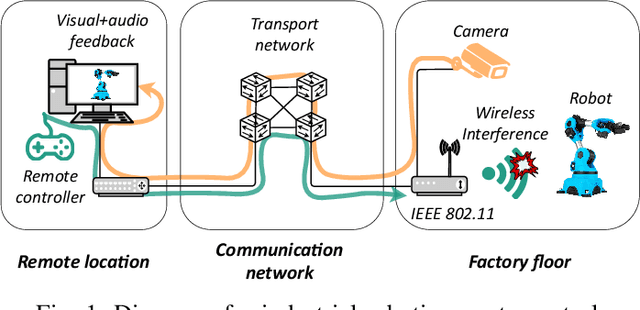
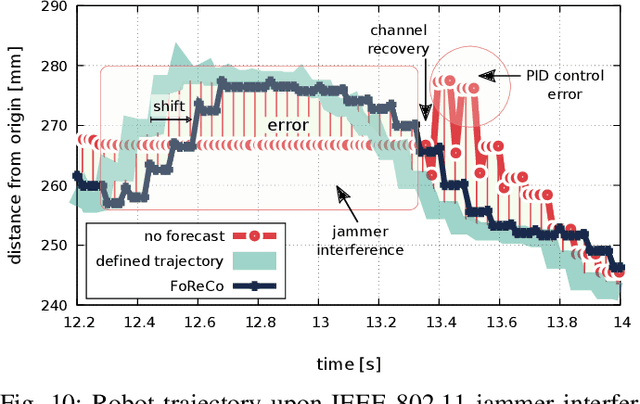
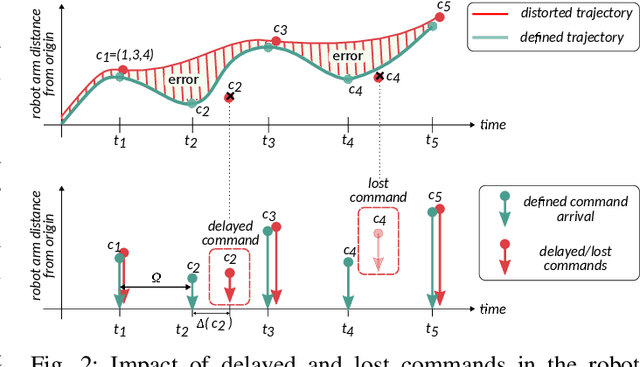
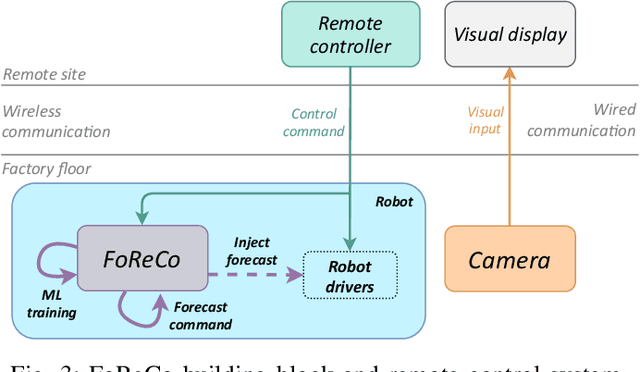
Wireless communications represent a game changer for future manufacturing plants, enabling flexible production chains as machinery and other components are not restricted to a location by the rigid wired connections on the factory floor. However, the presence of electromagnetic interference in the wireless spectrum may result in packet loss and delay, making it a challenging environment to meet the extreme reliability requirements of industrial applications. In such conditions, achieving real-time remote control, either from the Edge or Cloud, becomes complex. In this paper, we investigate a forecast-based recovery mechanism for real-time remote control of robotic manipulators (FoReCo) that uses Machine Learning (ML) to infer lost commands caused by interference in the wireless channel. FoReCo is evaluated through both simulation and experimentation in interference prone IEEE 802.11 wireless links, and using a commercial research robot that performs pick-and-place tasks. Results show that in case of interference, FoReCo trajectory error is decreased by x18 and x2 times in simulation and experimentation, and that FoReCo is sufficiently lightweight to be deployed in the hardware of already used in existing solutions.
COTORRA: COntext-aware Testbed fOR Robotic Applications
Jan 19, 2021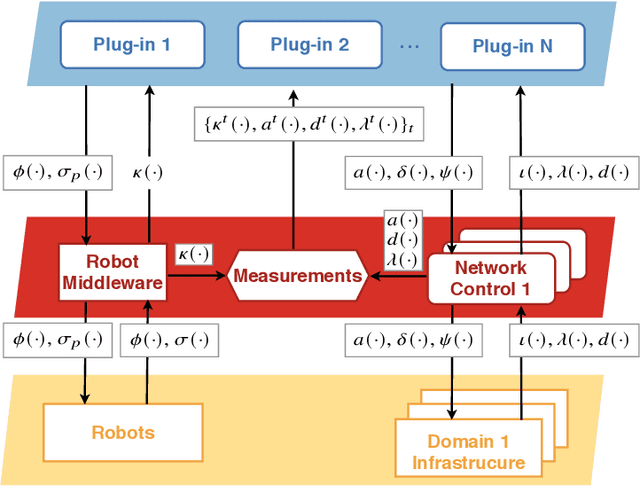
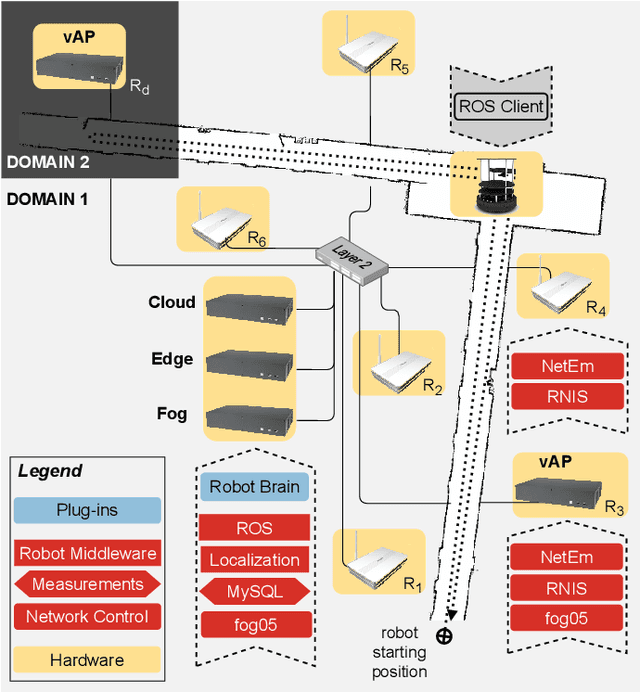
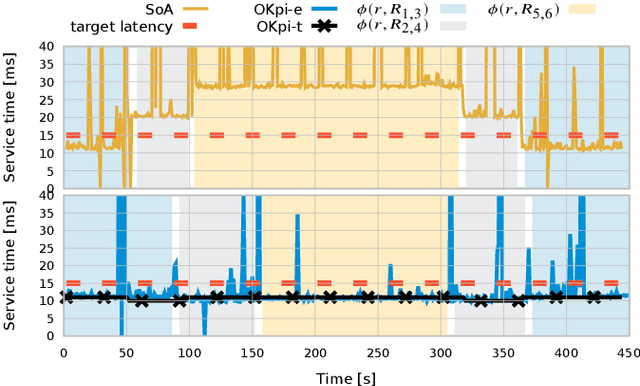
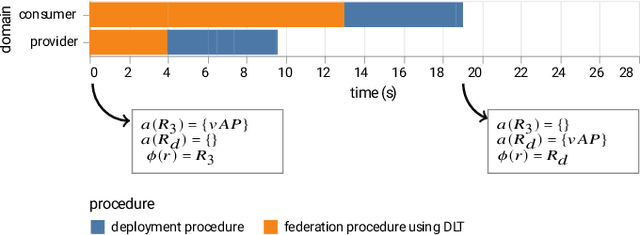
Edge & Fog computing have received considerable attention as promising candidates for the evolution of robotic systems. In this letter, we propose COTORRA, an Edge & Fog driven robotic testbed that combines context information with robot sensor data to validate innovative concepts for robotic systems prior to being applied in a production environment. In lab/university, we established COTORRA as an easy applicable and modular testbed on top of heterogeneous network infrastructure. COTORRA is open for pluggable robotic applications. To verify its feasibility and assess its performance, we ran set of experiments that show how autonomous navigation applications can achieve target latencies bellow 15ms or perform an inter-domain (DLT) federation within 19 seconds.