 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Efficient Optimal Planning and Control Framework For Quadrupedal Locomotion
Mar 04, 2017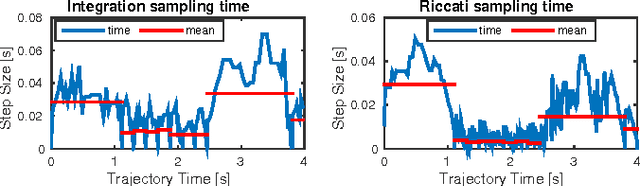

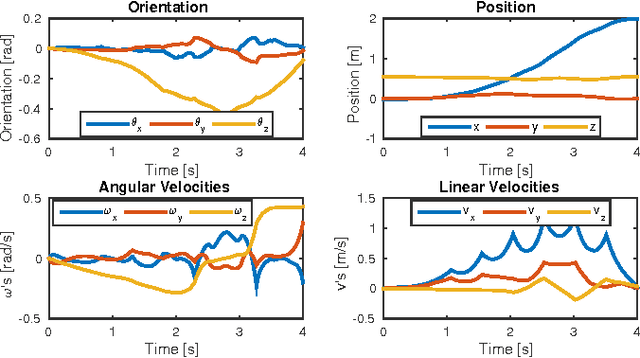
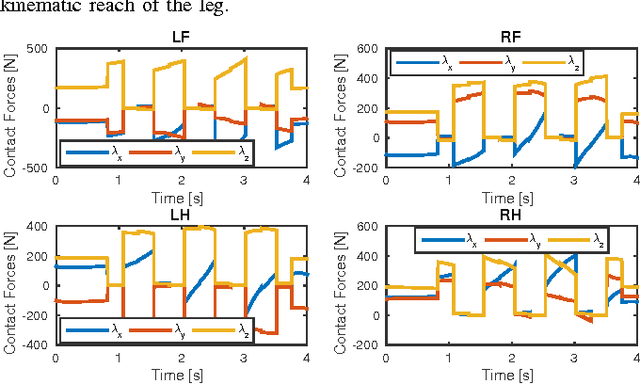
In this paper, we present an efficient Dynamic Programing framework for optimal planning and control of legged robots. First we formulate this problem as an optimal control problem for switched systems. Then we propose a multi--level optimization approach to find the optimal switching times and the optimal continuous control inputs. Through this scheme, the decomposed optimization can potentially be done more efficiently than the combined approach. Finally, we present a continuous-time constrained LQR algorithm which simultaneously optimizes the feedforward and feedback controller with $O(n)$ time-complexity. In order to validate our approach, we show the performance of our framework on a quadrupedal robot. We choose the Center of Mass dynamics and the full kinematic formulation as the switched system model where the switching times as well as the contact forces and the joint velocities are optimized for different locomotion tasks such as gap crossing, walking and trotting.
Mobile Robotic Fabrication at 1:1 scale: the In situ Fabricator
Jan 13, 2017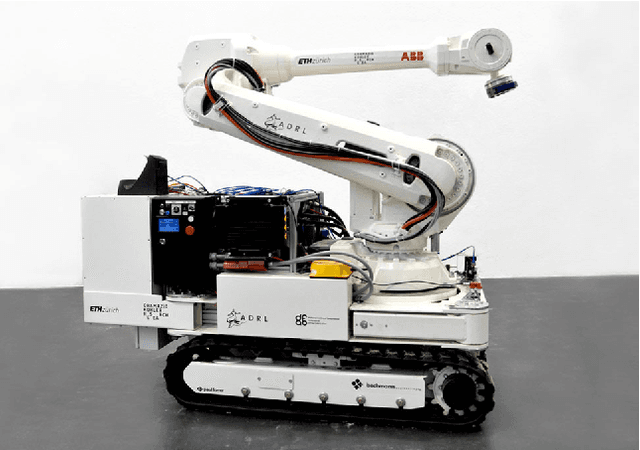
This paper presents the concept of an In situ Fabricator, a mobile robot intended for on-site manufacturing, assembly and digital fabrication. We present an overview of a prototype system, its capabilities, and highlight the importance of high-performance control, estimation and planning algorithms for achieving desired construction goals. Next, we detail on two architectural application scenarios: first, building a full-size undulating brick wall, which required a number of repositioning and autonomous localisation manoeuvres. Second, the Mesh Mould concrete process, which shows that an In situ Fabricator in combination with an innovative digital fabrication tool can be used to enable completely novel building technologies. Subsequently, important limitations and disadvantages of our approach are discussed. Based on that, we identify the need for a new type of robotic actuator, which facilitates the design of novel full-scale construction robots. We provide brief insight into the development of this actuator and conclude the paper with an outlook on the next-generation In situ Fabricator, which is currently under development.
Trajectory Optimization Through Contacts and Automatic Gait Discovery for Quadrupeds
Jul 15, 2016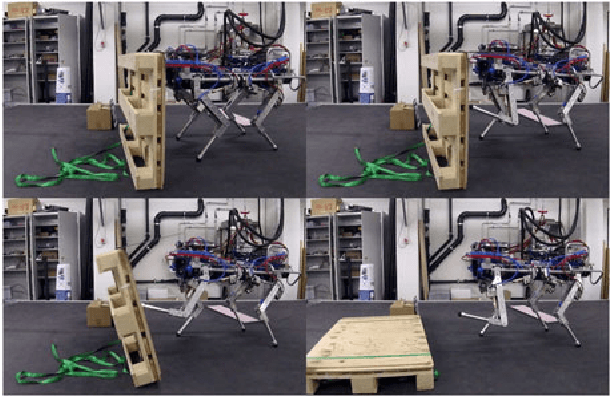
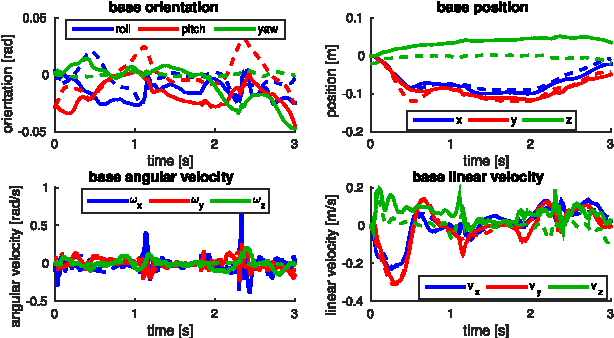
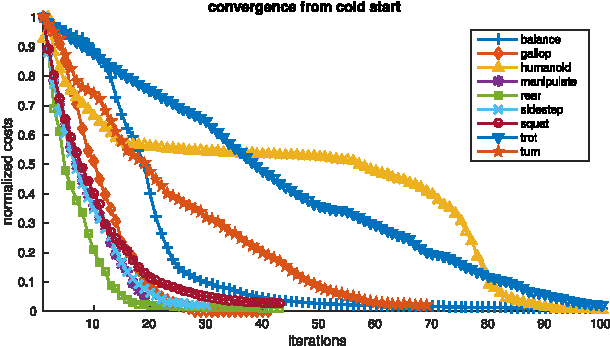
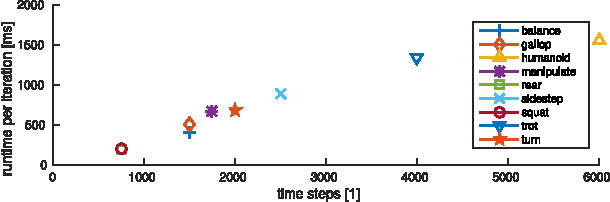
In this work we present a trajectory Optimization framework for whole-body motion planning through contacts. We demonstrate how the proposed approach can be applied to automatically discover different gaits and dynamic motions on a quadruped robot. In contrast to most previous methods, we do not pre-specify contact switches, timings, points or gait patterns, but they are a direct outcome of the optimization. Furthermore, we optimize over the entire dynamics of the robot, which enables the optimizer to fully leverage the capabilities of the robot. To illustrate the spectrum of achievable motions, here we show eight different tasks, which would require very different control structures when solved with state-of-the-art methods. Using our trajectory Optimization approach, we are solving each task with a simple, high level cost function and without any changes in the control structure. Furthermore, we fully integrated our approach with the robot's control and estimation framework such that optimization can be run online. By demonstrating a rough manipulation task with multiple dynamic contact switches, we exemplarily show how optimized trajectories and control inputs can be directly applied to hardware.
An Open Source, Fiducial Based, Visual-Inertial Motion Capture System
Jun 13, 2016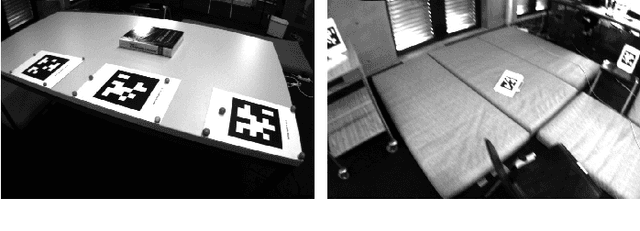
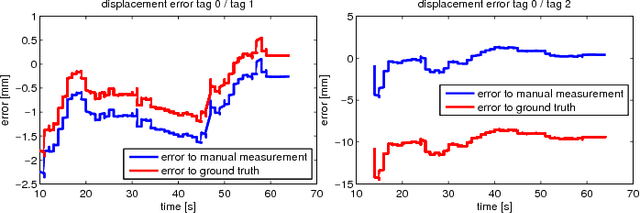
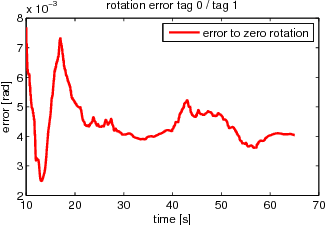
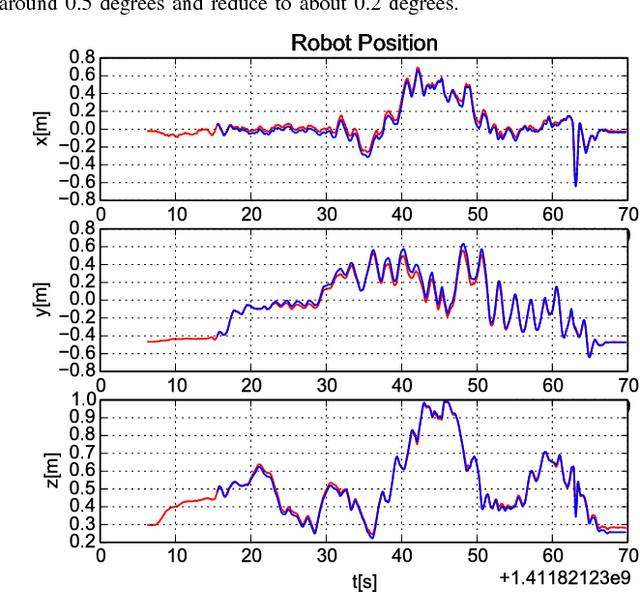
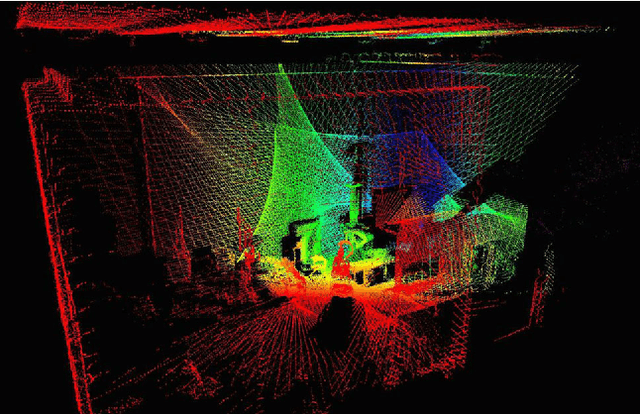
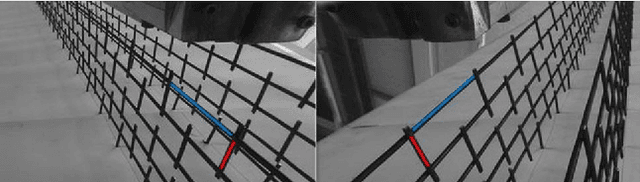
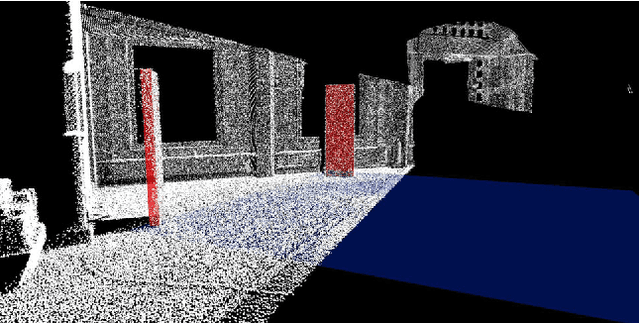
Many robotic tasks rely on the accurate localization of moving objects within a given workspace. This information about the objects' poses and velocities are used for control,motion planning, navigation, interaction with the environment or verification. Often motion capture systems are used to obtain such a state estimate. However, these systems are often costly, limited in workspace size and not suitable for outdoor usage. Therefore, we propose a lightweight and easy to use, visual-inertial Simultaneous Localization and Mapping approach that leverages cost-efficient, paper printable artificial landmarks, socalled fiducials. Results show that by fusing visual and inertial data, the system provides accurate estimates and is robust against fast motions and changing lighting conditions. Tight integration of the estimation of sensor and fiducial pose as well as extrinsics ensures accuracy, map consistency and avoids the requirement for precalibration. By providing an open source implementation and various datasets, partially with ground truth information, we enable community members to run, test, modify and extend the system either using these datasets or directly running the system on their own robotic setups.
Robot Impedance Control and Passivity Analysis with Inner Torque and Velocity Feedback Loops
May 23, 2016
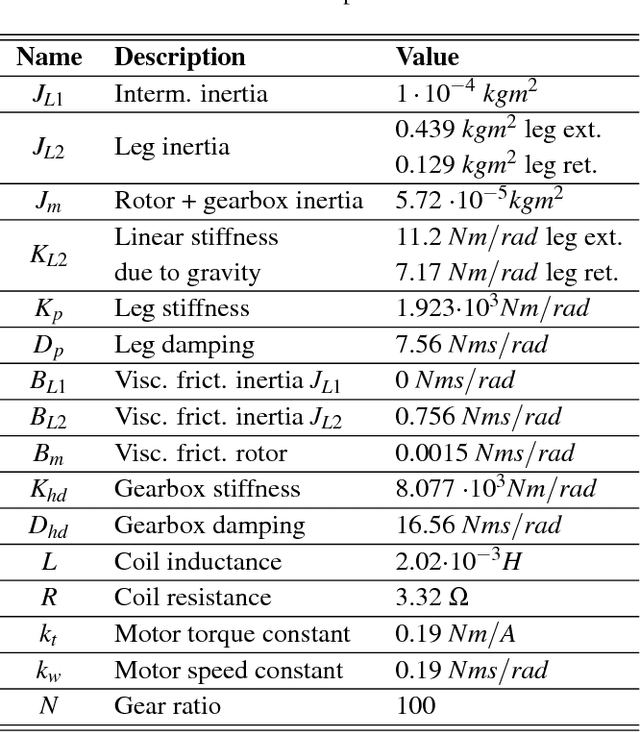
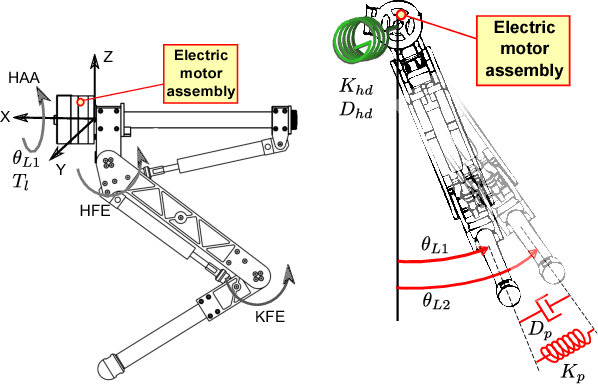
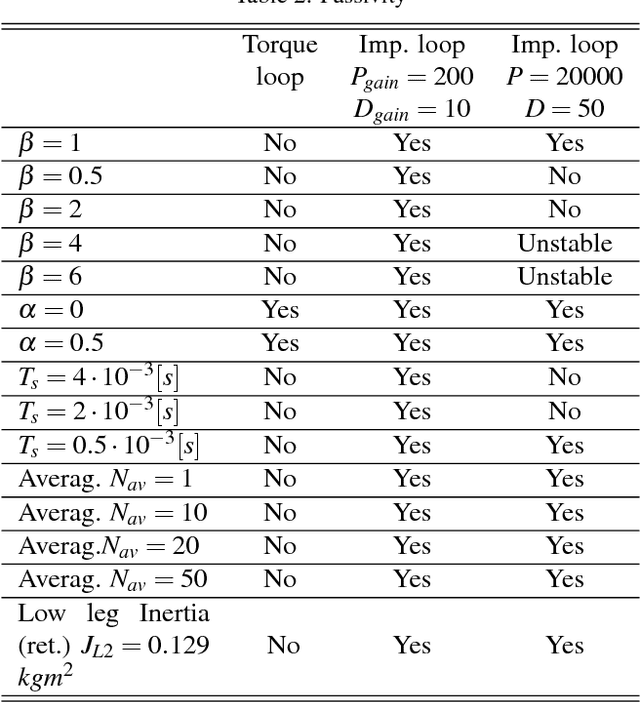
Impedance control is a well-established technique to control interaction forces in robotics. However, real implementations of impedance control with an inner loop may suffer from several limitations. Although common practice in designing nested control systems is to maximize the bandwidth of the inner loop to improve tracking performance, it may not be the most suitable approach when a certain range of impedance parameters has to be rendered. In particular, it turns out that the viable range of stable stiffness and damping values can be strongly affected by the bandwidth of the inner control loops (e.g. a torque loop) as well as by the filtering and sampling frequency. This paper provides an extensive analysis on how these aspects influence the stability region of impedance parameters as well as the passivity of the system. This will be supported by both simulations and experimental data. Moreover, a methodology for designing joint impedance controllers based on an inner torque loop and a positive velocity feedback loop will be presented. The goal of the velocity feedback is to increase (given the constraints to preserve stability) the bandwidth of the torque loop without the need of a complex controller.
Evaluating direct transcription and nonlinear optimization methods for robot motion planning
Jan 29, 2016
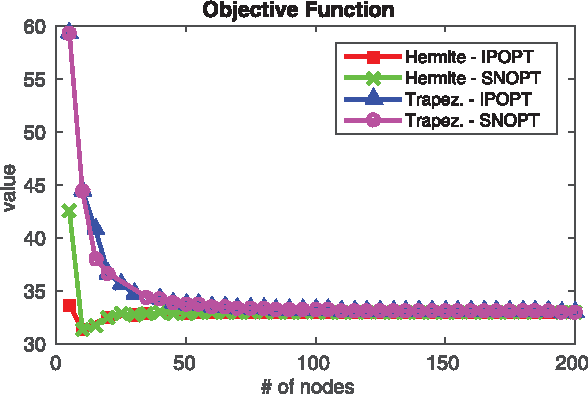

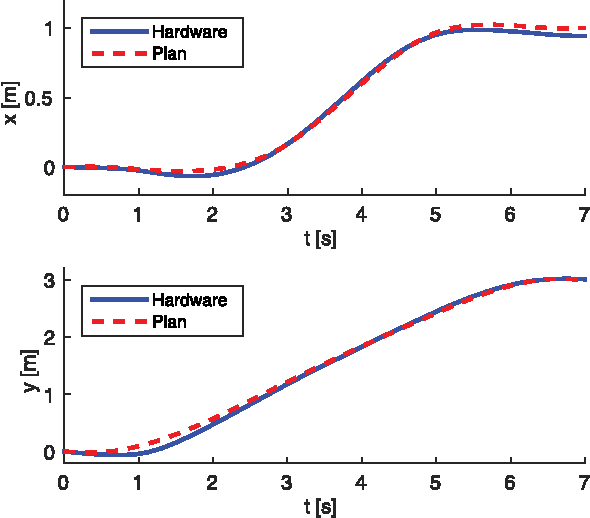
This paper studies existing direct transcription methods for trajectory optimization applied to robot motion planning. There are diverse alternatives for the implementation of direct transcription. In this study we analyze the effects of such alternatives when solving a robotics problem. Different parameters such as integration scheme, number of discretization nodes, initialization strategies and complexity of the problem are evaluated. We measure the performance of the methods in terms of computational time, accuracy and quality of the solution. Additionally, we compare two optimization methodologies frequently used to solve the transcribed problem, namely Sequential Quadratic Programming (SQP) and Interior Point Method (IPM). As a benchmark, we solve different motion tasks on an underactuated and non-minimal-phase ball-balancing robot with a 10 dimensional state space and 3 dimensional input space. Additionally, we validate the results on a simulated 3D quadrotor. Finally, as a verification of using direct transcription methods for trajectory optimization on real robots, we present hardware experiments on a motion task including path constraints and actuation limits.
Projection based whole body motion planning for legged robots
Oct 06, 2015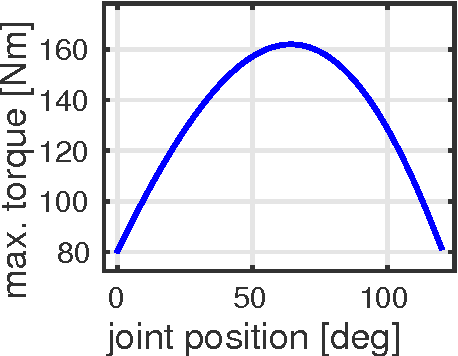
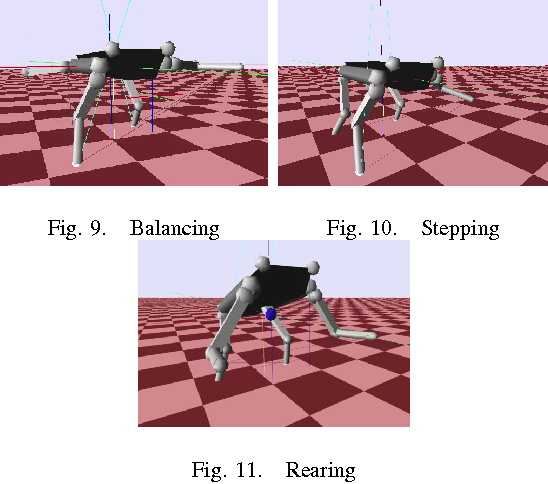
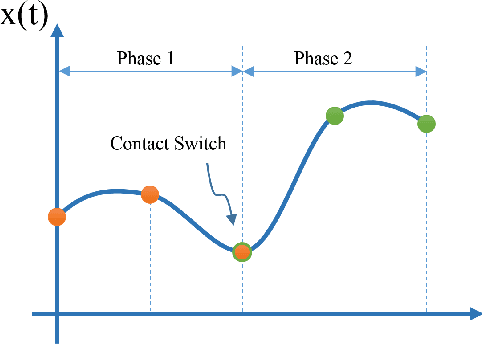
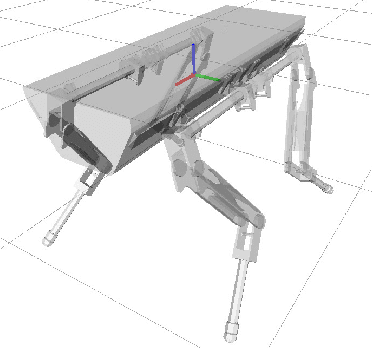
In this paper we present a new approach for dynamic motion planning for legged robots. We formulate a trajectory optimization problem based on a compact form of the robot dynamics. Such a form is obtained by projecting the rigid body dynamics onto the null space of the Constraint Jacobian. As consequence of the projection, contact forces are removed from the model but their effects are still taken into account. This approach permits to solve the optimal control problem of a floating base constrained multibody system while avoiding the use of an explicit contact model. We use direct transcription to numerically solve the optimization. As the contact forces are not part of the decision variables the size of the resultant discrete mathematical program is reduced and therefore solutions can be obtained in a tractable time. Using a predefined sequence of contact configurations (phases), our approach solves motions where contact switches occur. Transitions between phases are automatically resolved without using a model for switching dynamics. We present results on a hydraulic quadruped robot (HyQ), including single phase (standing, crouching) as well as multiple phase (rearing, diagonal leg balancing and stepping) dynamic motions.
A Domain Specific Language for kinematic models and fast implementations of robot dynamics algorithms
Jan 30, 2013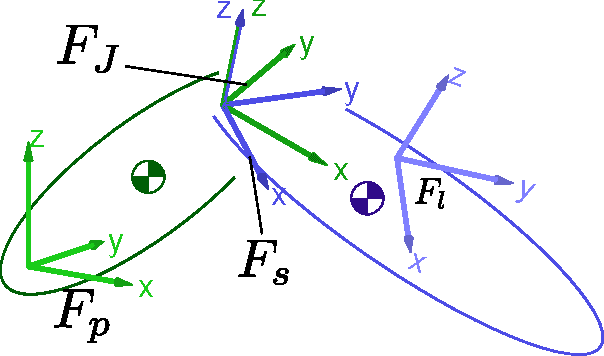
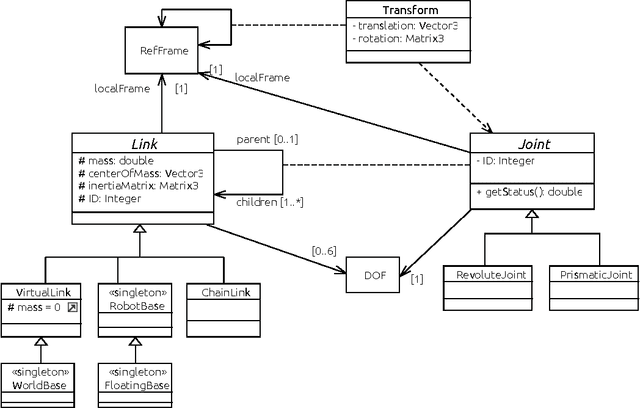
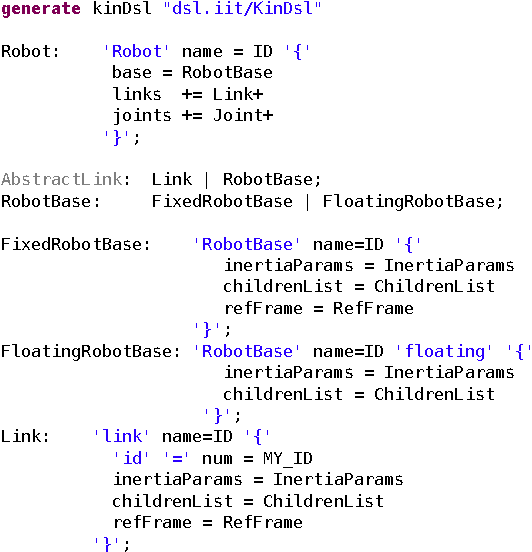
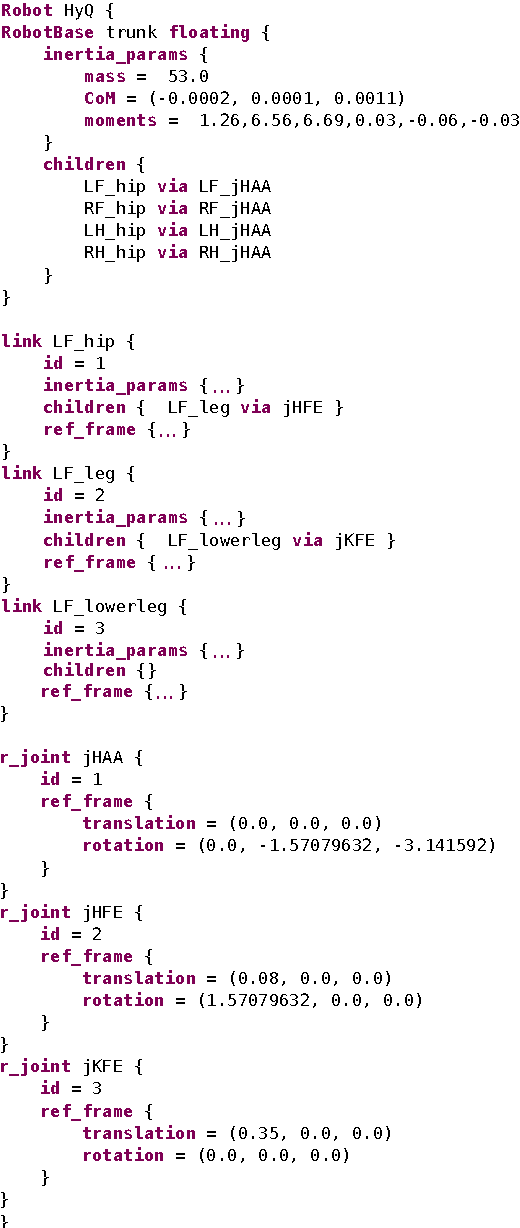
Rigid body dynamics algorithms play a crucial role in several components of a robot controller and simulations. Real time constraints in high frequency control loops and time requirements of specific applications demand these functions to be very efficient. Despite the availability of established algorithms, their efficient implementation for a specific robot still is a tedious and error-prone task. However, these components are simply necessary to get high performance controllers. To achieve efficient yet well maintainable implementations of dynamics algorithms we propose to use a domain specific language to describe the kinematics/dynamics model of a robot. Since the algorithms are parameterized on this model, executable code tailored for a specific robot can be generated, thanks to the facilities available for \dsls. This approach allows the users to deal only with the high level description of their robot and relieves them from problematic hand-crafted development; resources and efforts can then be focused on open research questions. Preliminary results about the generation of efficient code for inverse dynamics will be presented as a proof of concept of this approach.