 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReactEMG Stroke: Healthy-to-Stroke Few-shot Adaptation for sEMG-Based Intent Detection
Jan 29, 2026Surface electromyography (sEMG) is a promising control signal for assist-as-needed hand rehabilitation after stroke, but detecting intent from paretic muscles often requires lengthy, subject-specific calibration and remains brittle to variability. We propose a healthy-to-stroke adaptation pipeline that initializes an intent detector from a model pretrained on large-scale able-bodied sEMG, then fine-tunes it for each stroke participant using only a small amount of subject-specific data. Using a newly collected dataset from three individuals with chronic stroke, we compare adaptation strategies (head-only tuning, parameter-efficient LoRA adapters, and full end-to-end fine-tuning) and evaluate on held-out test sets that include realistic distribution shifts such as within-session drift, posture changes, and armband repositioning. Across conditions, healthy-pretrained adaptation consistently improves stroke intent detection relative to both zero-shot transfer and stroke-only training under the same data budget; the best adaptation methods improve average transition accuracy from 0.42 to 0.61 and raw accuracy from 0.69 to 0.78. These results suggest that transferring a reusable healthy-domain EMG representation can reduce calibration burden while improving robustness for real-time post-stroke intent detection.
ReactEMG: Zero-Shot, Low-Latency Intent Detection via sEMG
Jun 24, 2025



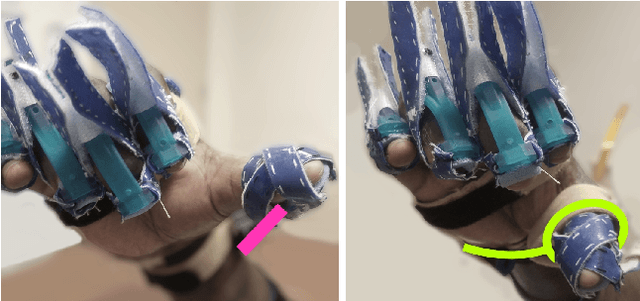
Surface electromyography (sEMG) signals show promise for effective human-computer interfaces, particularly in rehabilitation and prosthetics. However, challenges remain in developing systems that respond quickly and reliably to user intent, across different subjects and without requiring time-consuming calibration. In this work, we propose a framework for EMG-based intent detection that addresses these challenges. Unlike traditional gesture recognition models that wait until a gesture is completed before classifying it, our approach uses a segmentation strategy to assign intent labels at every timestep as the gesture unfolds. We introduce a novel masked modeling strategy that aligns muscle activations with their corresponding user intents, enabling rapid onset detection and stable tracking of ongoing gestures. In evaluations against baseline methods, considering both accuracy and stability for device control, our approach surpasses state-of-the-art performance in zero-shot transfer conditions, demonstrating its potential for wearable robotics and next-generation prosthetic systems. Our project page is available at: https://reactemg.github.io
Reciprocal Learning of Intent Inferral with Augmented Visual Feedback for Stroke
Dec 10, 2024



Intent inferral, the process by which a robotic device predicts a user's intent from biosignals, offers an effective and intuitive way to control wearable robots. Classical intent inferral methods treat biosignal inputs as unidirectional ground truths for training machine learning models, where the internal state of the model is not directly observable by the user. In this work, we propose reciprocal learning, a bidirectional paradigm that facilitates human adaptation to an intent inferral classifier. Our paradigm consists of iterative, interwoven stages that alternate between updating machine learning models and guiding human adaptation with the use of augmented visual feedback. We demonstrate this paradigm in the context of controlling a robotic hand orthosis for stroke, where the device predicts open, close, and relax intents from electromyographic (EMG) signals and provides appropriate assistance. We use LED progress-bar displays to communicate to the user the predicted probabilities for open and close intents by the classifier. Our experiments with stroke subjects show reciprocal learning improving performance in a subset of subjects (two out of five) without negatively impacting performance on the others. We hypothesize that, during reciprocal learning, subjects can learn to reproduce more distinguishable muscle activation patterns and generate more separable biosignals.
ChatEMG: Synthetic Data Generation to Control a Robotic Hand Orthosis for Stroke
Jun 17, 2024



Intent inferral on a hand orthosis for stroke patients is challenging due to the difficulty of data collection from impaired subjects. Additionally, EMG signals exhibit significant variations across different conditions, sessions, and subjects, making it hard for classifiers to generalize. Traditional approaches require a large labeled dataset from the new condition, session, or subject to train intent classifiers; however, this data collection process is burdensome and time-consuming. In this paper, we propose ChatEMG, an autoregressive generative model that can generate synthetic EMG signals conditioned on prompts (i.e., a given sequence of EMG signals). ChatEMG enables us to collect only a small dataset from the new condition, session, or subject and expand it with synthetic samples conditioned on prompts from this new context. ChatEMG leverages a vast repository of previous data via generative training while still remaining context-specific via prompting. Our experiments show that these synthetic samples are classifier-agnostic and can improve intent inferral accuracy for different types of classifiers. We demonstrate that our complete approach can be integrated into a single patient session, including the use of the classifier for functional orthosis-assisted tasks. To the best of our knowledge, this is the first time an intent classifier trained partially on synthetic data has been deployed for functional control of an orthosis by a stroke survivor. Videos and additional information can be found at https://jxu.ai/chatemg.
Meta-Learning for Fast Adaptation in Intent Inferral on a Robotic Hand Orthosis for Stroke
Mar 19, 2024



We propose MetaEMG, a meta-learning approach for fast adaptation in intent inferral on a robotic hand orthosis for stroke. One key challenge in machine learning for assistive and rehabilitative robotics with disabled-bodied subjects is the difficulty of collecting labeled training data. Muscle tone and spasticity often vary significantly among stroke subjects, and hand function can even change across different use sessions of the device for the same subject. We investigate the use of meta-learning to mitigate the burden of data collection needed to adapt high-capacity neural networks to a new session or subject. Our experiments on real clinical data collected from five stroke subjects show that MetaEMG can improve the intent inferral accuracy with a small session- or subject-specific dataset and very few fine-tuning epochs. To the best of our knowledge, we are the first to formulate intent inferral on stroke subjects as a meta-learning problem and demonstrate fast adaptation to a new session or subject for controlling a robotic hand orthosis with EMG signals.
Grasp Force Assistance via Throttle-based Wrist Angle Control on a Robotic Hand Orthosis for C6-C7 Spinal Cord Injury
Feb 12, 2024



Individuals with hand paralysis resulting from C6-C7 spinal cord injuries frequently rely on tenodesis for grasping. However, tenodesis generates limited grasping force and demands constant exertion to maintain a grasp, leading to fatigue and sometimes pain. We introduce the MyHand-SCI, a wearable robot that provides grasping assistance through motorized exotendons. Our user-driven device enables independent, ipsilateral operation via a novel Throttle-based Wrist Angle control method, which allows users to maintain grasps without continued wrist extension. A pilot case study with a person with C6 spinal cord injury shows an improvement in functional grasping and grasping force, as well as a preserved ability to modulate grasping force while using our device, thus improving their ability to manipulate everyday objects. This research is a step towards developing effective and intuitive wearable assistive devices for individuals with spinal cord injury.
Volitional Control of the Paretic Hand Post-Stroke Increases Finger Stiffness and Resistance to Robot-Assisted Movement
Feb 12, 2024
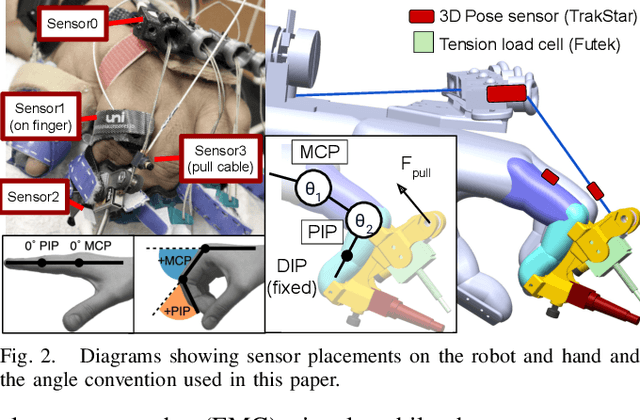
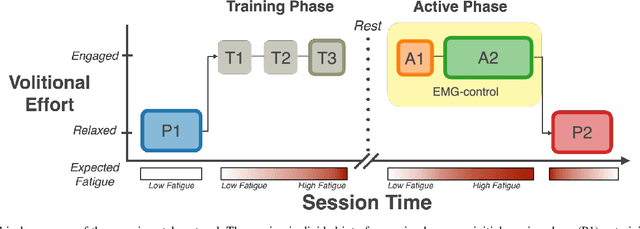
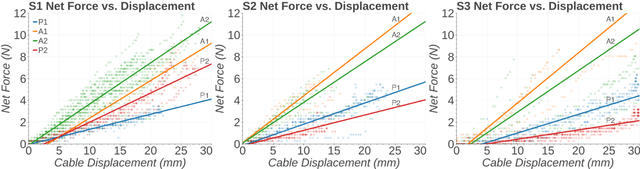
Increased effort during use of the paretic arm and hand can provoke involuntary abnormal synergy patterns and amplify stiffness effects of muscle tone for individuals after stroke, which can add difficulty for user-controlled devices to assist hand movement during functional tasks. We study how volitional effort, exerted in an attempt to open or close the hand, affects resistance to robot-assisted movement at the finger level. We perform experiments with three chronic stroke survivors to measure changes in stiffness when the user is actively exerting effort to activate ipsilateral EMG-controlled robot-assisted hand movements, compared with when the fingers are passively stretched, as well as overall effects from sustained active engagement and use. Our results suggest that active engagement of the upper extremity increases muscle tone in the finger to a much greater degree than through passive-stretch or sustained exertion over time. Potential design implications of this work suggest that developers should anticipate higher levels of finger stiffness when relying on user-driven ipsilateral control methods for assistive or rehabilitative devices for stroke.
Towards Tenodesis-Modulated Control of an Assistive Hand Exoskeleton for SCI
Nov 28, 2023



Restoration of hand function is one of the highest priorities for SCI populations. In this work, we present a prototype of a robotic assistive orthosis capable of implementing tenodesis user control. The underactuated device provides active grasping assistance while preserving free wrist mobility through the use of Bowden cables. This device enables force modulation during grasping, which was effectively leveraged by a participant with C6 SCI to demonstrate improved grasping abilities using the orthosis, scoring 11 on the Grasp and Release Test using the device compared to 1 without it.
Design of Spiral-Cable Forearm Exoskeleton to Provide Supination Adjustment for Hemiparetic Stroke Subjects
Oct 05, 2021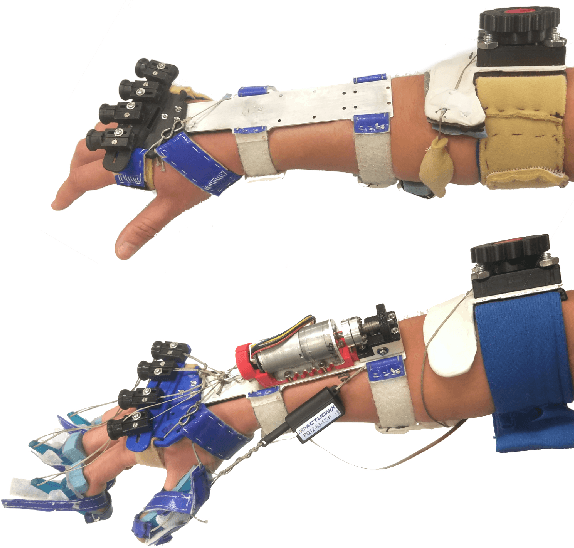

We present the development of a cable-based passive forearm exoskeleton, designed to assist supination for hemiparetic stroke survivors, that uniquely provides torque sufficient for counteracting spasticity within a below-elbow apparatus. The underactuated mechanism consists of a spiral single-tendon routing embedded in a rigid forearm brace and terminated at the hand and upper-forearm. A spool with an internal releasable-ratchet mechanism allows the user to manually retract the tendon and rotate the hand to counteract involuntary pronation synergies due to stroke. We performed device characterization with two healthy subjects, and conducted a feasibility test of the forearm mechanism in maintaining a neutral hand position with a single chronic stroke subject having no volitional supination capacity. Our preliminary assessment on an impaired subject suggests comparative performance in supination assistance between our implementation and a commercial passive splint, and shows promise in improving capabilities of existing robotic exoskeletons for stroke.
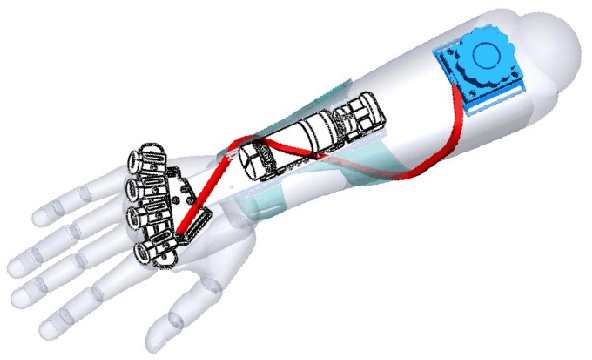
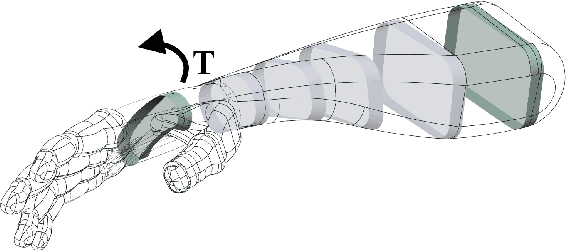
Thumb Assistance Via Active and Passive Exotendons in a Robotic Hand Orthosis for Stroke
Oct 05, 2021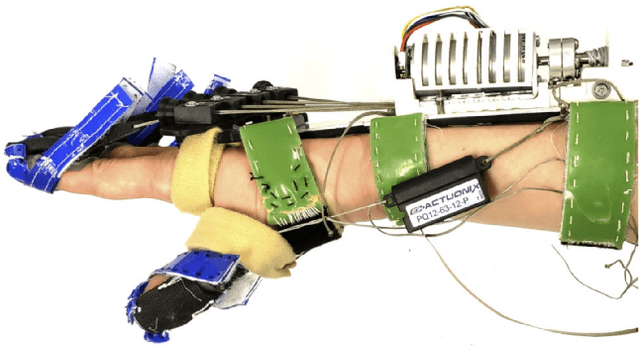
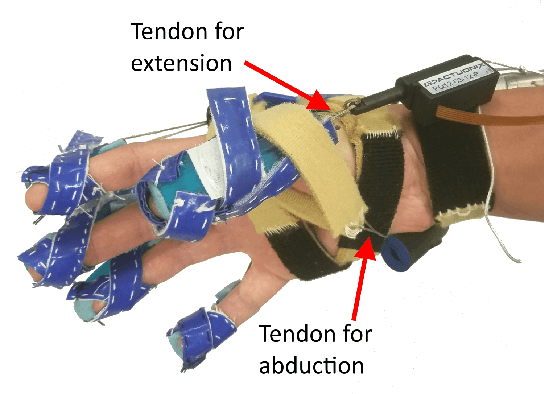

We present a tendon-driven, active-extension thumb exoskeleton adding opposition/reposition capabilities to a robotic hand orthosis designed for individuals with chronic upper-limb hemiparesis after stroke. The orthosis uses two actuators to assist hand-opening, with one tendon network controlling simultaneous four-finger extension and one separately driving thumb extension. When combined with a passive palmar abduction constraint, the thumb network can counteract spasticity and provide stable thumb opposition for manipulating objects in a range of sizes. We performed a preliminary assessment with five chronic stroke survivors presenting with arm-hand motor deficits and increased muscle tone (spasticity). Experiments consisted of unimanual resistive-pull tasks and bimanual twisting tasks with simulated real-world objects; these explored the effects of thumb assistance on grasp stability and functional range of motion. We specifically compare functional performance of actuation against static thumb-splinting and against no device. The addition of active-extension to the thumb improves positioning ability when reaching for objects, and improves consistency and duration of maintaining stable grasps.