 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLossless Coding of Light Fields based on 4D Minimum Rate Predictors
Apr 13, 2021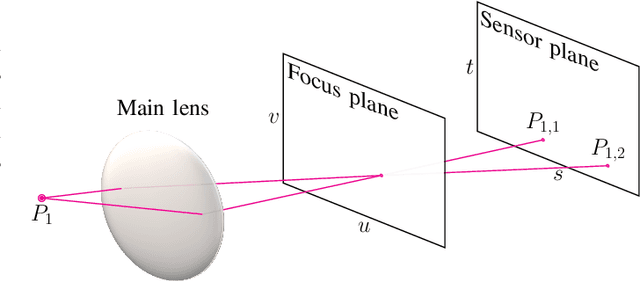
Common representations of light fields use four-dimensional data structures, where a given pixel is closely related not only to its spatial neighbours within the same view, but also to its angular neighbours, co-located in adjacent views. Such structure presents increased redundancy between pixels, when compared with regular single-view images. Then, these redundancies are exploited to obtain compressed representations of the light field, using prediction algorithms specifically tailored to estimate pixel values based on both spatial and angular references. This paper proposes new encoding schemes which take advantage of the four-dimensional light field data structures to improve the coding performance of Minimum Rate Predictors. The proposed methods expand previous research on lossless coding beyond the current state-of-the-art. The experimental results, obtained using both traditional datasets and others more challenging, show bit-rate savings no smaller than 10%, when compared with existing methods for lossless light field compression.
The STRANDS Project: Long-Term Autonomy in Everyday Environments
Oct 14, 2016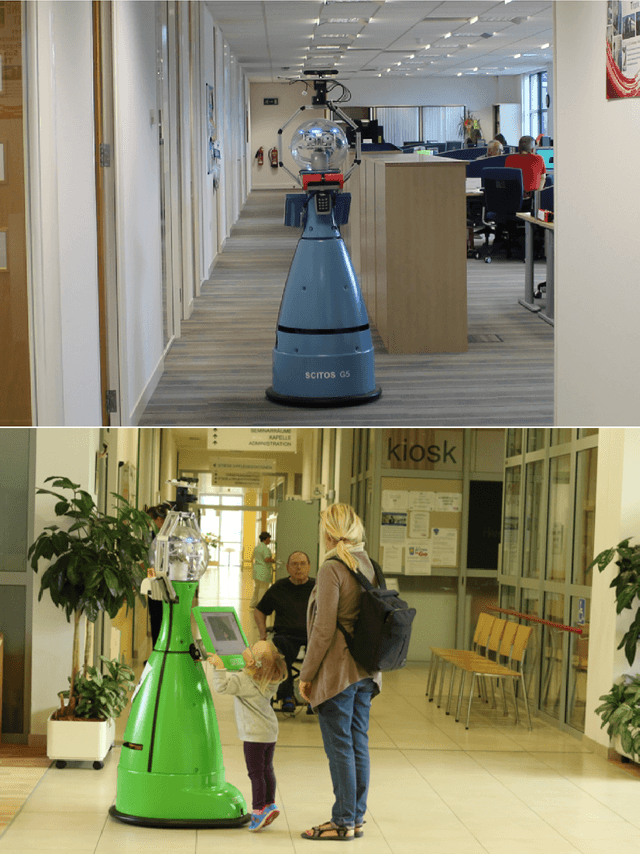
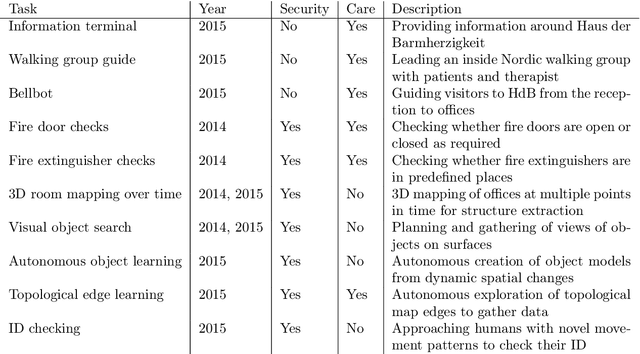
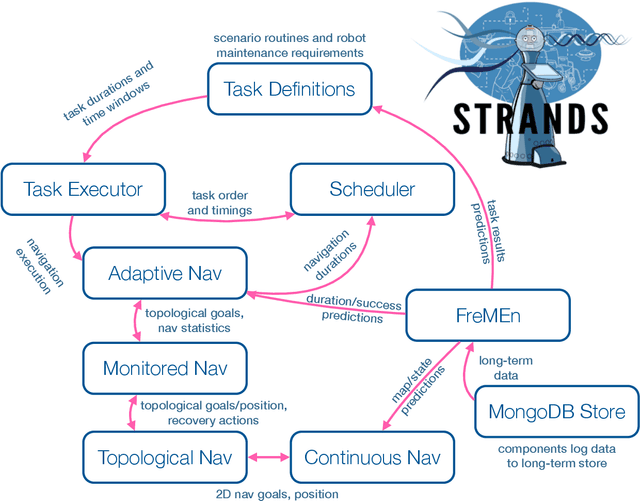
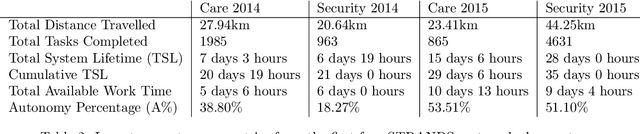
Thanks to the efforts of the robotics and autonomous systems community, robots are becoming ever more capable. There is also an increasing demand from end-users for autonomous service robots that can operate in real environments for extended periods. In the STRANDS project we are tackling this demand head-on by integrating state-of-the-art artificial intelligence and robotics research into mobile service robots, and deploying these systems for long-term installations in security and care environments. Over four deployments, our robots have been operational for a combined duration of 104 days autonomously performing end-user defined tasks, covering 116km in the process. In this article we describe the approach we have used to enable long-term autonomous operation in everyday environments, and how our robots are able to use their long run times to improve their own performance.