 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Ultra Low-Bit Post-Training Quantization via Stable Diagonal Curvature Estimate
Apr 15, 2026Large Language Models (LLMs) are widely used across many domains, but their scale makes deployment challenging. Post-Training Quantization (PTQ) reduces memory footprint without retraining by leveraging a small calibration set. Recent Hessian-based PTQ methods compensate quantization error via cross-channel dependencies, but such approaches degrade at low bit-widths due to noisy curvature estimates from limited calibration data. We propose DASH-Q, a robust PTQ framework using diagonal Hessian approximation and iterative weighted least squares. By discarding noise-prone dependencies, DASH-Q filters sampling noise while prioritizing the preservation of salient feature power. We outperform other PTQ baselines in ultra low-bit regime, improving zero-shot accuracy by 7.01% on average and up to 14.01% over the strongest baselines across five baseline LLM models, while showing robust and stable performance with very small calibration data.
Enhancing eLoran Timing Accuracy via Machine Learning with Meteorological and Terrain Data
Jun 18, 2025



The vulnerabilities of global navigation satellite systems (GNSS) to signal interference have increased the demand for complementary positioning, navigation, and timing (PNT) systems. To address this, South Korea has decided to deploy an enhanced long-range navigation (eLoran) system as a complementary PNT solution. Similar to GNSS, eLoran provides highly accurate timing information, which is essential for applications such as telecommunications, financial systems, and power distribution. However, the primary sources of error for GNSS and eLoran differ. For eLoran, the main source of error is signal propagation delay over land, known as the additional secondary factor (ASF). This delay, influenced by ground conductivity and weather conditions along the signal path, is challenging to predict and mitigate. In this paper, we measure the time difference (TD) between GPS and eLoran using a time interval counter and analyze the correlations between eLoran/GPS TD and eleven meteorological factors. Accurate estimation of eLoran/GPS TD could enable eLoran to achieve timing accuracy comparable to that of GPS. We propose two estimation models for eLoran/GPS TD and compare their performance with existing TD estimation methods. The proposed WLR-AGRNN model captures the linear relationships between meteorological factors and eLoran/GPS TD using weighted linear regression (WLR) and models nonlinear relationships between outputs from expert networks through an anisotropic general regression neural network (AGRNN). The model incorporates terrain elevation to appropriately weight meteorological data, as elevation influences signal propagation delay. Experimental results based on four months of data demonstrate that the WLR-AGRNN model outperforms other models, highlighting its effectiveness in improving eLoran/GPS TD estimation accuracy.
Toward High Accuracy DME for Alternative Aircraft Positioning: SFOL Pulse Transmission in High-Power DME
Jun 07, 2025The Stretched-FrOnt-Leg (SFOL) pulse is an advanced distance measuring equipment (DME) pulse that offers superior ranging accuracy compared to conventional Gaussian pulses. Successful SFOL pulse transmission has been recently demonstrated from a commercial Gaussian pulse-based DME in low-power mode utilizing digital predistortion (DPD) techniques for power amplifiers. These adjustments were achieved through software modifications, enabling SFOL integration without replacing existing DME infrastructure. However, the SFOL pulse is designed to optimize ranging capabilities by leveraging the effective radiated power (ERP) and pulse shape parameters permitted within DME specifications. Consequently, it operates with narrow margins against these specifications, potentially leading to non-compliance when transmitted in high-power mode. This paper introduces strategies to enable a Gaussian pulse-based DME to transmit the SFOL pulse while adhering to DME specifications in high-power mode. The proposed strategies involve use of a variant of the SFOL pulse and DPD techniques utilizing truncated singular value decomposition, tailored for high-power DME operations. Test results, conducted on a testbed utilizing a commercial Gaussian pulse-based DME, demonstrate the effectiveness of these strategies, ensuring compliance with DME specifications in high-power mode with minimal performance loss. This study enables cost-effective integration of high-accuracy SFOL pulses into existing high-power DME systems, enhancing aircraft positioning precision while ensuring compliance with industry standards.
Quantum Support Vector Machine-Based Classification of GPS Signal Reception Conditions
Aug 11, 2024



Global Positioning System (GPS) plays a critical role in navigation by utilizing satellite signals, but its accuracy in urban environments is often compromised by signal obstructions. Previous research has categorized GPS reception conditions into line-of-sight (LOS), non-line-of-sight (NLOS), and LOS+NLOS scenarios to enhance accuracy. This paper introduces a novel approach using quantum support vector machines (QSVM) with a ZZ feature map and fidelity quantum kernel to classify urban GPS signal reception conditions, comparing its performance against classical SVM methods. While classical SVM has been previously explored for this purpose, our study is the first to apply QSVM to this classification task. We conducted experiments using datasets from two distinct urban locations to train and evaluate SVM and QSVM models. Our results demonstrate that QSVM achieves superior classification accuracy compared to classical SVM for urban GPS signal datasets. Additionally, we emphasize the importance of appropriately scaling raw data when utilizing QSVM.
HELPS for Emergency Location Service: Hyper-Enhanced Local Positioning System
Aug 07, 2024



In this study, we propose a novel positioning and searching system for emergency location services, namely the hyper-enhanced local positioning system (HELPS), which is applicable to all mobile phone users, including legacy feature phone users. In the case of an emergency, rescuers are dispatched with portable signal measurement equipment around the estimated location of the emergency caller. Each signal measurement device measures the uplink signal from the mobile phone of the caller. After calculating the rough location of the caller's mobile phone based on these measurements, rescuers can efficiently search for the caller using the received uplink signal strength. Thus, the positioning accuracy in a conventional sense is not a limitation for rescuers in finding the caller. HELPS is not a traditional positioning system but rather a system with humans in the loop designed to reduce search time in emergencies. HELPS can provide emergency location information even in environments where the GPS or Wi-Fi is not functional. Furthermore, for HELPS operation, no hardware changes or software installations are required on the caller's mobile phone.
Benchmark Underestimates the Readiness of Multi-lingual Dialogue Agents
May 28, 2024



Creating multilingual task-oriented dialogue (TOD) agents is challenging due to the high cost of training data acquisition. Following the research trend of improving training data efficiency, we show for the first time, that in-context learning is sufficient to tackle multilingual TOD. To handle the challenging dialogue state tracking (DST) subtask, we break it down to simpler steps that are more compatible with in-context learning where only a handful of few-shot examples are used. We test our approach on the multilingual TOD dataset X-RiSAWOZ, which has 12 domains in Chinese, English, French, Korean, Hindi, and code-mixed Hindi-English. Our turn-by-turn DST accuracy on the 6 languages range from 55.6% to 80.3%, seemingly worse than the SOTA results from fine-tuned models that achieve from 60.7% to 82.8%; our BLEU scores in the response generation (RG) subtask are also significantly lower than SOTA. However, after manual evaluation of the validation set, we find that by correcting gold label errors and improving dataset annotation schema, GPT-4 with our prompts can achieve (1) 89.6%-96.8% accuracy in DST, and (2) more than 99% correct response generation across different languages. This leads us to conclude that current automatic metrics heavily underestimate the effectiveness of in-context learning.
IR-UWB Radar-Based Contactless Silent Speech Recognition of Vowels, Consonants, Words, and Phrases
Dec 15, 2023



Several sensing techniques have been proposed for silent speech recognition (SSR); however, many of these methods require invasive processes or sensor attachment to the skin using adhesive tape or glue, rendering them unsuitable for frequent use in daily life. By contrast, impulse radio ultra-wideband (IR-UWB) radar can operate without physical contact with users' articulators and related body parts, offering several advantages for SSR. These advantages include high range resolution, high penetrability, low power consumption, robustness to external light or sound interference, and the ability to be embedded in space-constrained handheld devices. This study demonstrated IR-UWB radar-based contactless SSR using four types of speech stimuli (vowels, consonants, words, and phrases). To achieve this, a novel speech feature extraction algorithm specifically designed for IR-UWB radar-based SSR is proposed. Each speech stimulus is recognized by applying a classification algorithm to the extracted speech features. Two different algorithms, multidimensional dynamic time warping (MD-DTW) and deep neural network-hidden Markov model (DNN-HMM), were compared for the classification task. Additionally, a favorable radar antenna position, either in front of the user's lips or below the user's chin, was determined to achieve higher recognition accuracy. Experimental results demonstrated the efficacy of the proposed speech feature extraction algorithm combined with DNN-HMM for classifying vowels, consonants, words, and phrases. Notably, this study represents the first demonstration of phoneme-level SSR using contactless radar.
X-RiSAWOZ: High-Quality End-to-End Multilingual Dialogue Datasets and Few-shot Agents
Jun 30, 2023



Task-oriented dialogue research has mainly focused on a few popular languages like English and Chinese, due to the high dataset creation cost for a new language. To reduce the cost, we apply manual editing to automatically translated data. We create a new multilingual benchmark, X-RiSAWOZ, by translating the Chinese RiSAWOZ to 4 languages: English, French, Hindi, Korean; and a code-mixed English-Hindi language. X-RiSAWOZ has more than 18,000 human-verified dialogue utterances for each language, and unlike most multilingual prior work, is an end-to-end dataset for building fully-functioning agents. The many difficulties we encountered in creating X-RiSAWOZ led us to develop a toolset to accelerate the post-editing of a new language dataset after translation. This toolset improves machine translation with a hybrid entity alignment technique that combines neural with dictionary-based methods, along with many automated and semi-automated validation checks. We establish strong baselines for X-RiSAWOZ by training dialogue agents in the zero- and few-shot settings where limited gold data is available in the target language. Our results suggest that our translation and post-editing methodology and toolset can be used to create new high-quality multilingual dialogue agents cost-effectively. Our dataset, code, and toolkit are released open-source.
Low-Cost GNSS Simulators with Wireless Clock Synchronization for Indoor Positioning
Jun 01, 2023



In regions where global navigation satellite systems (GNSS) signals are unavailable, such as underground areas and tunnels, GNSS simulators can be deployed for transmitting simulated GNSS signals. Then, a GNSS receiver in the simulator coverage outputs the position based on the received GNSS signals (e.g., Global Positioning System (GPS) L1 signals in this study) transmitted by the corresponding simulator. This approach provides periodic position updates to GNSS users while deploying a small number of simulators without modifying the hardware and software of user receivers. However, the simulator clock should be synchronized to the GNSS satellite clock to generate almost identical signals to the live-sky GNSS signals, which is necessary for seamless indoor and outdoor positioning handover. The conventional clock synchronization method based on the wired connection between each simulator and an outdoor GNSS antenna causes practical difficulty and increases the cost of deploying the simulators. This study proposes a wireless clock synchronization method based on a private time server and time delay calibration. Additionally, we derived the constraints for determining the optimal simulator coverage and separation between adjacent simulators. The positioning performance of the proposed GPS simulator-based indoor positioning system was demonstrated in the underground testbed for a driving vehicle with a GPS receiver and a pedestrian with a smartphone. The average position errors were 3.7 m for the vehicle and 9.6 m for the pedestrian during the field tests with successful indoor and outdoor positioning handovers. Since those errors are within the coverage of each deployed simulator, it is confirmed that the proposed system with wireless clock synchronization can effectively provide periodic position updates to users where live-sky GNSS signals are unavailable.
Machine-Learning-Based Classification of GPS Signal Reception Conditions Using a Dual-Polarized Antenna in Urban Areas
May 06, 2023

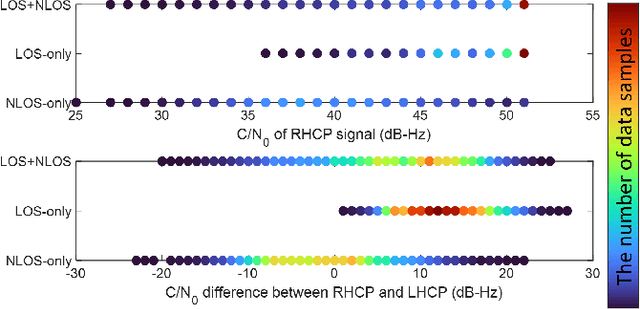

In urban areas, dense buildings frequently block and reflect global positioning system (GPS) signals, resulting in the reception of a few visible satellites with many multipath signals. This is a significant problem that results in unreliable positioning in urban areas. If a signal reception condition from a certain satellite can be detected, the positioning performance can be improved by excluding or de-weighting the multipath contaminated satellite signal. Thus, we developed a machine-learning-based method of classifying GPS signal reception conditions using a dual-polarized antenna. We employed a decision tree algorithm for classification using three features, one of which can be obtained only from a dual-polarized antenna. A machine-learning model was trained using GPS signals collected from various locations. When the features extracted from the GPS raw signal are input, the generated machine-learning model outputs one of the three signal reception conditions: non-line-of-sight (NLOS) only, line-of-sight (LOS) only, or LOS+NLOS. Multiple testing datasets were used to analyze the classification accuracy, which was then compared with an existing method using dual single-polarized antennas. Consequently, when the testing dataset was collected at different locations from the training dataset, a classification accuracy of 64.47% was obtained, which was slightly higher than the accuracy of the existing method using dual single-polarized antennas. Therefore, the dual-polarized antenna solution is more beneficial than the dual single-polarized antenna solution because it has a more compact form factor and its performance is similar to that of the other solution.