 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoad is Enough! Extrinsic Calibration of Non-overlapping Stereo Camera and LiDAR using Road Information
Mar 06, 2019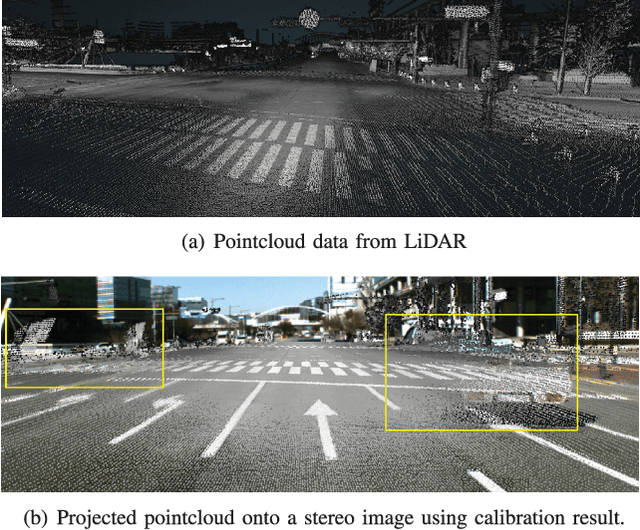
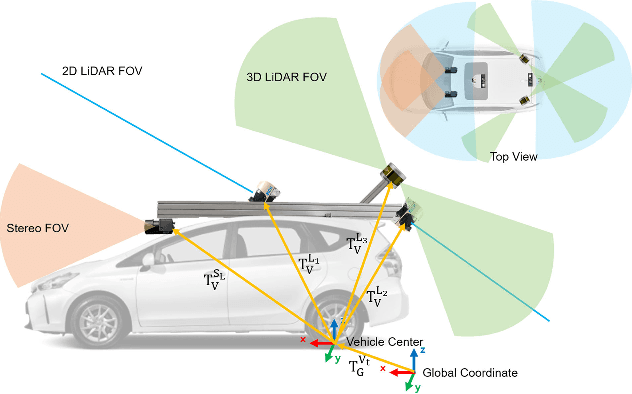
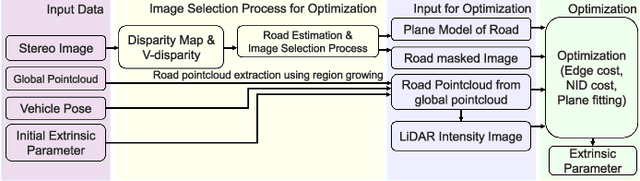
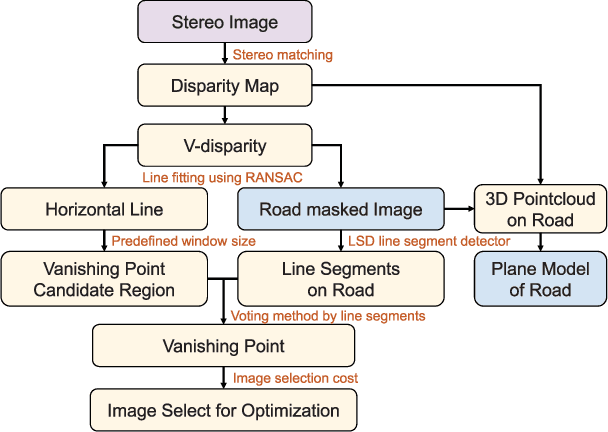
This paper presents a framework for the targetless extrinsic calibration of stereo cameras and Light Detection and Ranging (LiDAR) sensors with a non-overlapping Field of View (FOV). In order to solve the extrinsic calibrations problem under such challenging configuration, the proposed solution exploits road markings as static and robust features among the various dynamic objects that are present in urban environment. First, this study utilizes road markings that are commonly captured by the two sensor modalities to select informative images for estimating the extrinsic parameters. In order to accomplish stable optimization, multiple cost functions are defined, including Normalized Information Distance (NID), edge alignment and, plane fitting cost. Therefore a smooth cost curve is formed for global optimization to prevent convergence to the local optimal point. We further evaluate each cost function by examining parameter sensitivity near the optimal point. Another key characteristic of extrinsic calibration, repeatability, is analyzed by conducting the proposed method multiple times with varying randomly perturbed initial points.
Complex Urban LiDAR Data Set
Mar 16, 2018
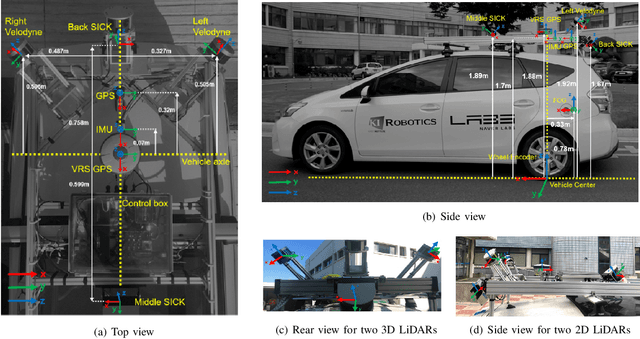
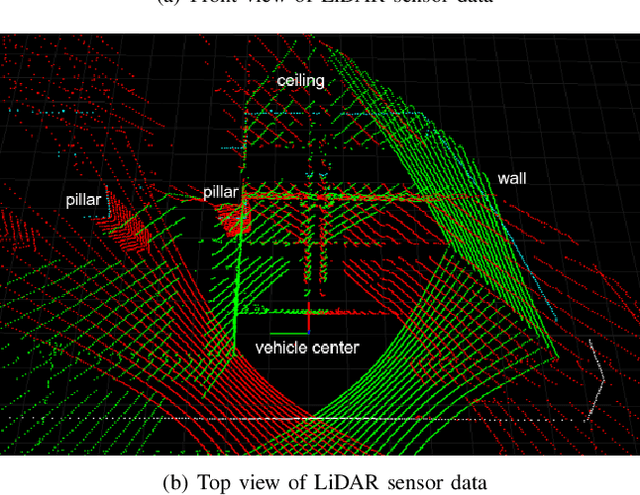
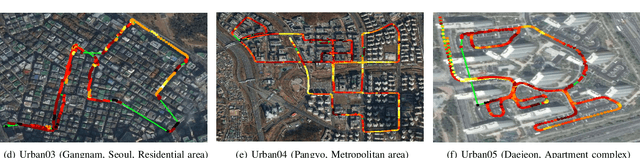
This paper presents a Light Detection and Ranging (LiDAR) data set that targets complex urban environments. Urban environments with high-rise buildings and congested traffic pose a significant challenge for many robotics applications. The presented data set is unique in the sense it is able to capture the genuine features of an urban environment (e.g. metropolitan areas, large building complexes and underground parking lots). Data of two-dimensional (2D) and threedimensional (3D) LiDAR, which are typical types of LiDAR sensors, are provided in the data set. The two 16-ray 3D LiDARs are tilted on both sides for maximal coverage. One 2D LiDAR faces backward while the other faces forwards to collect data of roads and buildings, respectively. Raw sensor data from Fiber Optic Gyro (FOG), Inertial Measurement Unit (IMU), and the Global Positioning System (GPS) are presented in a file format for vehicle pose estimation. The pose information of the vehicle estimated at 100 Hz is also presented after applying the graph simultaneous localization and mapping (SLAM) algorithm. For the convenience of development, the file player and data viewer in Robot Operating System (ROS) environment were also released via the web page. The full data sets are available at: http://irap.kaist.ac.kr/dataset. In this website, 3D preview of each data set is provided using WebGL.