 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoad is Enough! Extrinsic Calibration of Non-overlapping Stereo Camera and LiDAR using Road Information
Paper and Code
Mar 06, 2019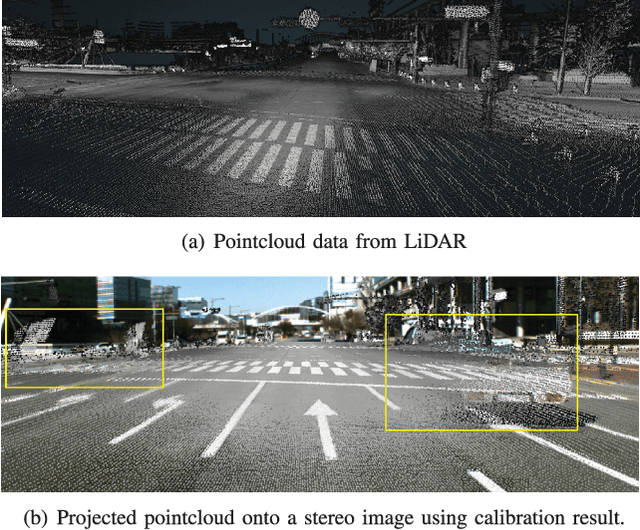
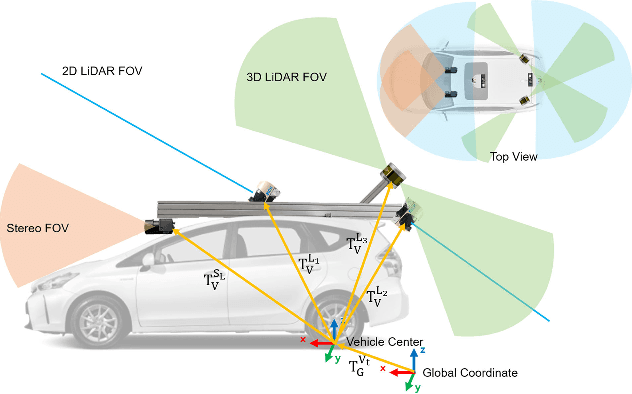
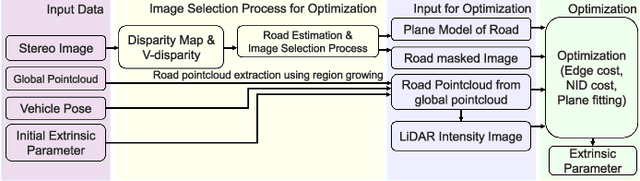
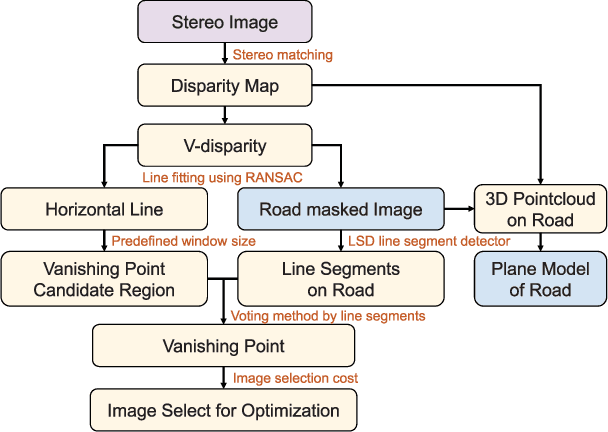
This paper presents a framework for the targetless extrinsic calibration of stereo cameras and Light Detection and Ranging (LiDAR) sensors with a non-overlapping Field of View (FOV). In order to solve the extrinsic calibrations problem under such challenging configuration, the proposed solution exploits road markings as static and robust features among the various dynamic objects that are present in urban environment. First, this study utilizes road markings that are commonly captured by the two sensor modalities to select informative images for estimating the extrinsic parameters. In order to accomplish stable optimization, multiple cost functions are defined, including Normalized Information Distance (NID), edge alignment and, plane fitting cost. Therefore a smooth cost curve is formed for global optimization to prevent convergence to the local optimal point. We further evaluate each cost function by examining parameter sensitivity near the optimal point. Another key characteristic of extrinsic calibration, repeatability, is analyzed by conducting the proposed method multiple times with varying randomly perturbed initial points.