 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyperSim: A Holistic Sim-To-Real Framework For Robust Robotic Manipulation
May 26, 2026Scaling data volume and diversity is critical for generalizing embodied intelligence. While synthetic data generation offers a scalable alternative to expensive physical data acquisition, transferring robotic manipulation policies from simulation to the real world (sim-to-real) remains a formidable challenge due to the domain gap. This paper presents HyperSim, a holistic framework spanning from synthetic data generation to policy training and seamless real-world deployment. To systematically bridge the sim-to-real gap, HyperSim is realized through three core pillars: high-fidelity environment synthesis, adversarial trajectory generation, and sim-and-real co-training. Collectively, these modules address domain discrepancies by enhancing visual fidelity, expanding data coverage, and enforcing domain-invariant representations. We rigorously validate HyperSim through a large-scale empirical study involving 400 real-world task executions across two representative manipulation models. Assessed across three fine-grained metrics, our complete pipeline achieves remarkable sim-to-real success rates of 80% and 95% with ACT and π_{0}, respectively. Furthermore, policies trained on our adversarial trajectories exhibit significantly enhanced robustness against dynamic uncertainties, achieving a 35% higher completion rate under physical perturbations.
KERT: Automatic Extraction and Ranking of Topical Keyphrases from Content-Representative Document Titles
Jun 03, 2013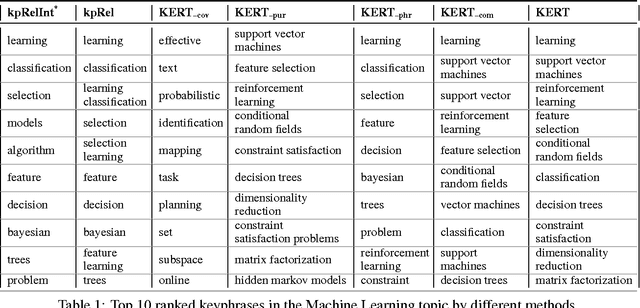
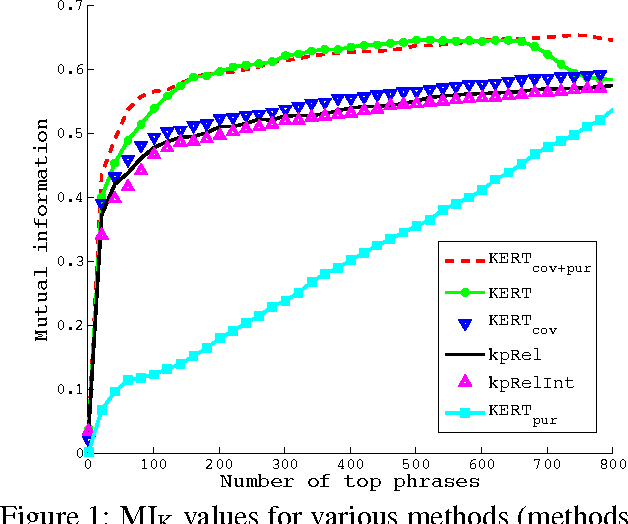
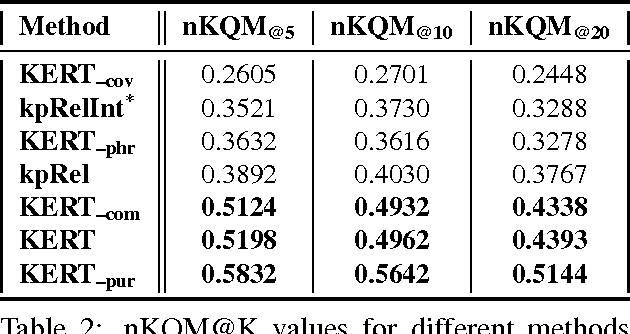
We introduce KERT (Keyphrase Extraction and Ranking by Topic), a framework for topical keyphrase generation and ranking. By shifting from the unigram-centric traditional methods of unsupervised keyphrase extraction to a phrase-centric approach, we are able to directly compare and rank phrases of different lengths. We construct a topical keyphrase ranking function which implements the four criteria that represent high quality topical keyphrases (coverage, purity, phraseness, and completeness). The effectiveness of our approach is demonstrated on two collections of content-representative titles in the domains of Computer Science and Physics.