 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey of Context Engineering for Large Language Models
Jul 17, 2025The performance of Large Language Models (LLMs) is fundamentally determined by the contextual information provided during inference. This survey introduces Context Engineering, a formal discipline that transcends simple prompt design to encompass the systematic optimization of information payloads for LLMs. We present a comprehensive taxonomy decomposing Context Engineering into its foundational components and the sophisticated implementations that integrate them into intelligent systems. We first examine the foundational components: context retrieval and generation, context processing and context management. We then explore how these components are architecturally integrated to create sophisticated system implementations: retrieval-augmented generation (RAG), memory systems and tool-integrated reasoning, and multi-agent systems. Through this systematic analysis of over 1300 research papers, our survey not only establishes a technical roadmap for the field but also reveals a critical research gap: a fundamental asymmetry exists between model capabilities. While current models, augmented by advanced context engineering, demonstrate remarkable proficiency in understanding complex contexts, they exhibit pronounced limitations in generating equally sophisticated, long-form outputs. Addressing this gap is a defining priority for future research. Ultimately, this survey provides a unified framework for both researchers and engineers advancing context-aware AI.
A novel stereo matching pipeline with robustness and unfixed disparity search range
Apr 11, 2022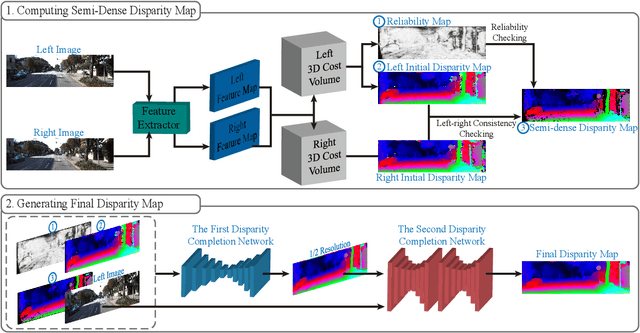
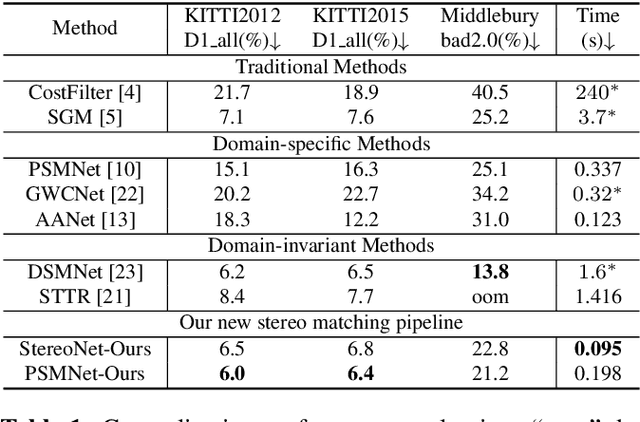
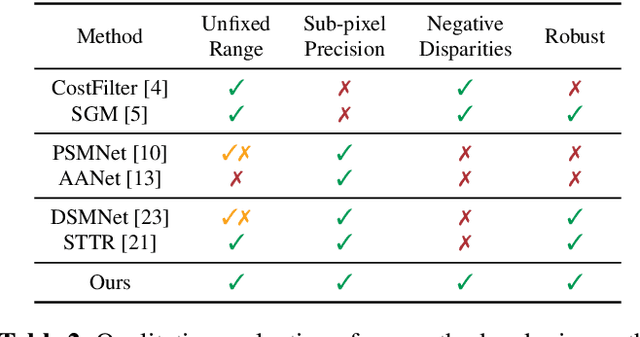
Stereo matching is an essential basis for various applications, but most stereo matching methods have poor generalization performance and require a fixed disparity search range. Moreover, current stereo matching methods focus on the scenes that only have positive disparities, but ignore the scenes that contain both positive and negative disparities, such as 3D movies. In this paper, we present a new stereo matching pipeline that first computes semi-dense disparity maps based on binocular disparity, and then completes the rest depending on monocular cues. The new stereo matching pipeline have the following advantages: It 1) has better generalization performance than most of the current stereo matching methods; 2) relaxes the limitation of a fixed disparity search range; 3) can handle the scenes that involve both positive and negative disparities, which has more potential applications, such as view synthesis in 3D multimedia and VR/AR. Experimental results demonstrate the effectiveness of our new stereo matching pipeline.