 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolving Disjunctive Temporal Networks with Uncertainty under Restricted Time-Based Controllability using Tree Search and Graph Neural Networks
Mar 30, 2022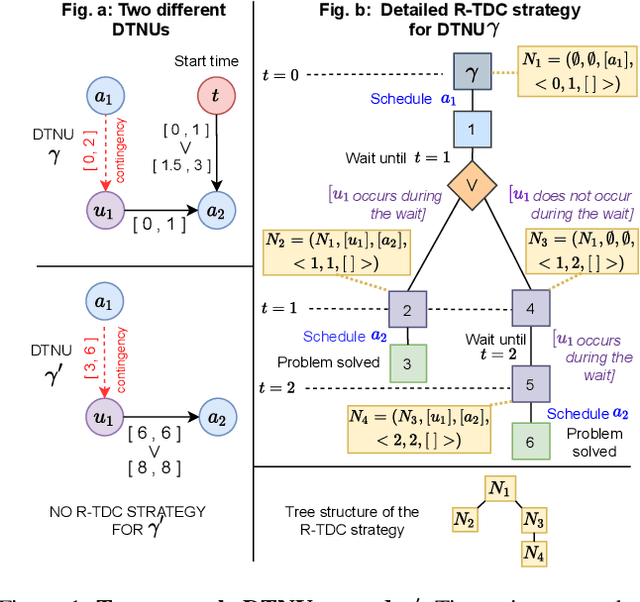
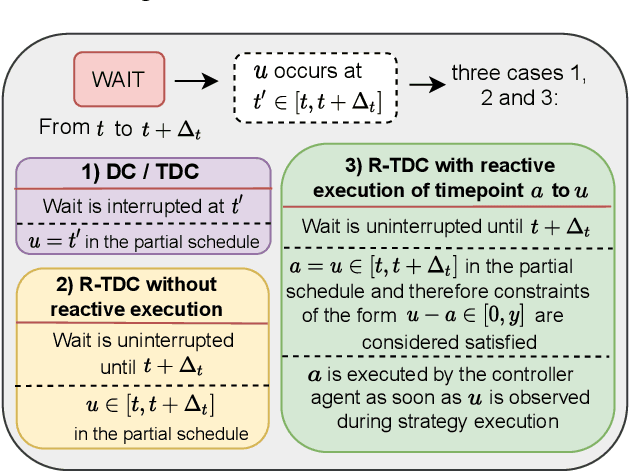
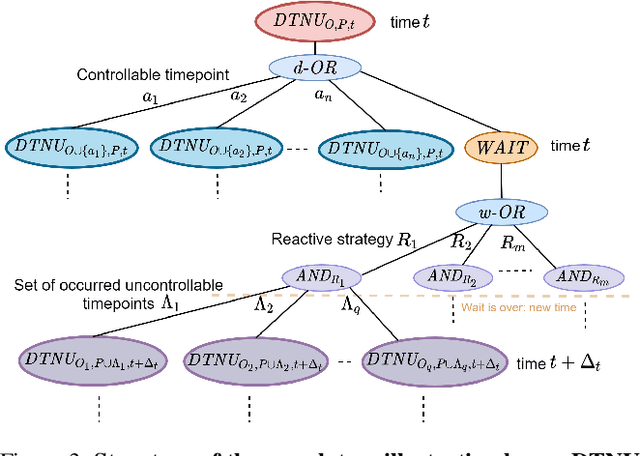
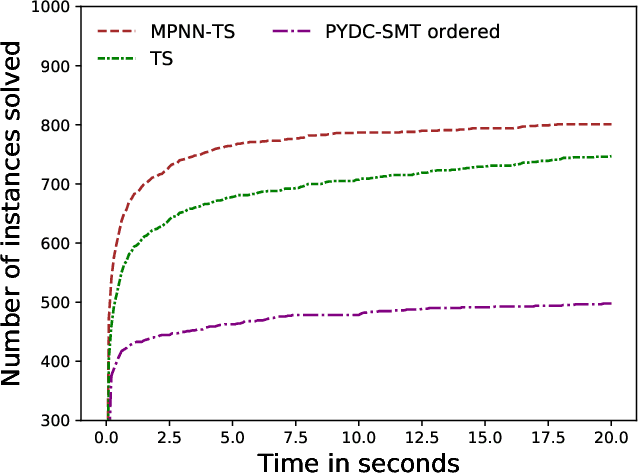
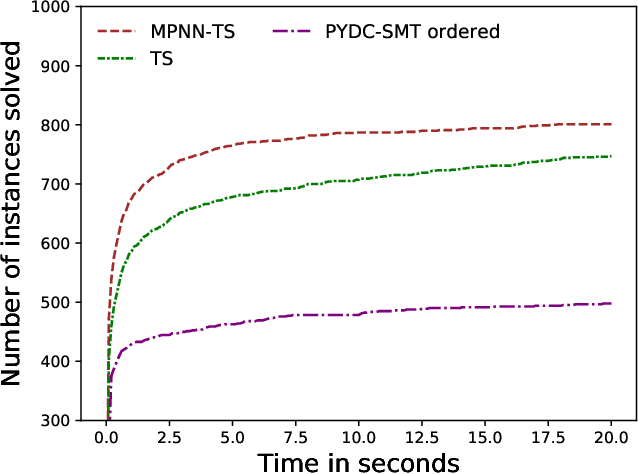
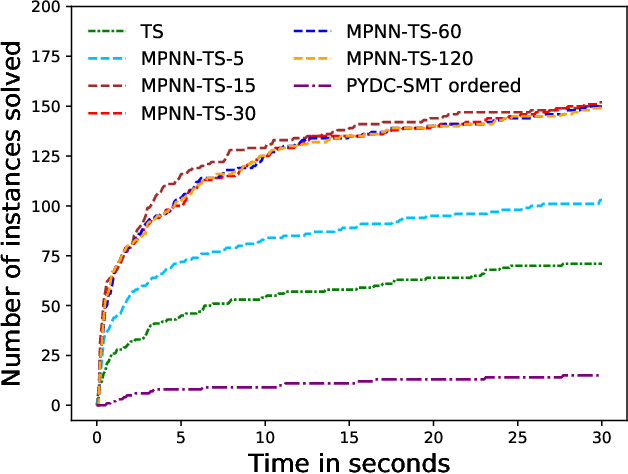
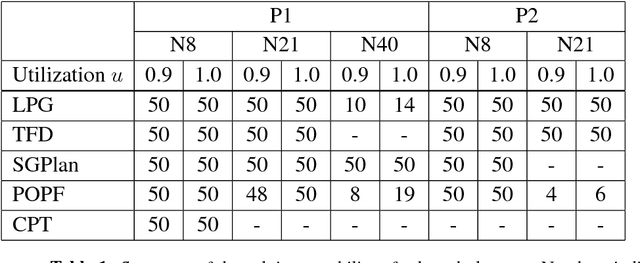
Planning under uncertainty is an area of interest in artificial intelligence. We present a novel approach based on tree search and graph machine learning for the scheduling problem known as Disjunctive Temporal Networks with Uncertainty (DTNU). Dynamic Controllability (DC) of DTNUs seeks a reactive scheduling strategy to satisfy temporal constraints in response to uncontrollable action durations. We introduce new semantics for reactive scheduling: Time-based Dynamic Controllability (TDC) and a restricted subset of TDC, R-TDC. We design a tree search algorithm to determine whether or not a DTNU is R-TDC. Moreover, we leverage a graph neural network as a heuristic for tree search guidance. Finally, we conduct experiments on a known benchmark on which we show R-TDC to retain significant completeness with regard to DC, while being faster to prove. This results in the tree search processing fifty percent more DTNU problems in R-TDC than the state-of-the-art DC solver does in DC with the same time budget. We also observe that graph neural network search guidance leads to substantial performance gains on benchmarks of more complex DTNUs, with up to eleven times more problems solved than the baseline tree search.
* Thirty-Sixth AAAI Conference on Artificial Intelligence. This version includes the technical appendix. arXiv admin note: substantial text overlap with arXiv:2108.01068
Time-based Dynamic Controllability of Disjunctive Temporal Networks with Uncertainty: A Tree Search Approach with Graph Neural Network Guidance
Aug 02, 2021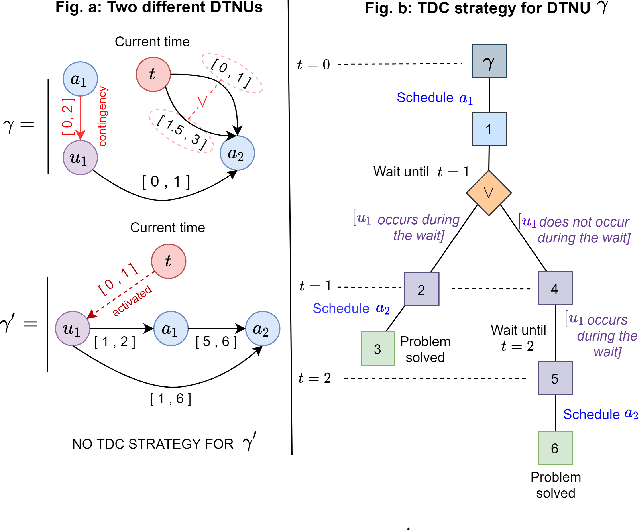
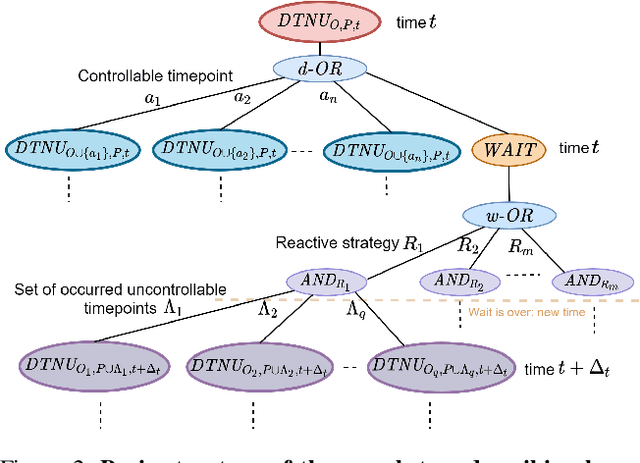
Scheduling in the presence of uncertainty is an area of interest in artificial intelligence due to the large number of applications. We study the problem of dynamic controllability (DC) of disjunctive temporal networks with uncertainty (DTNU), which seeks a strategy to satisfy all constraints in response to uncontrollable action durations. We introduce a more restricted, stronger form of controllability than DC for DTNUs, time-based dynamic controllability (TDC), and present a tree search approach to determine whether or not a DTNU is TDC. Moreover, we leverage the learning capability of a message passing neural network (MPNN) as a heuristic for tree search guidance. Finally, we conduct experiments for which the tree search shows superior results to state-of-the-art timed-game automata (TGA) based approaches. We observe that using an MPNN for tree search guidance leads to a significant increase in solving performance and scalability to harder DTNU problems.
Advancing the Scientific Frontier with Increasingly Autonomous Systems
Sep 15, 2020A close partnership between people and partially autonomous machines has enabled decades of space exploration. But to further expand our horizons, our systems must become more capable. Increasing the nature and degree of autonomy - allowing our systems to make and act on their own decisions as directed by mission teams - enables new science capabilities and enhances science return. The 2011 Planetary Science Decadal Survey (PSDS) and on-going pre-Decadal mission studies have identified increased autonomy as a core technology required for future missions. However, even as scientific discovery has necessitated the development of autonomous systems and past flight demonstrations have been successful, institutional barriers have limited its maturation and infusion on existing planetary missions. Consequently, the authors and endorsers of this paper recommend that new programmatic pathways be developed to infuse autonomy, infrastructure for support autonomous systems be invested in, new practices be adopted, and the cost-saving value of autonomy for operations be studied.
Planning for Compilation of a Quantum Algorithm for Graph Coloring
Feb 23, 2020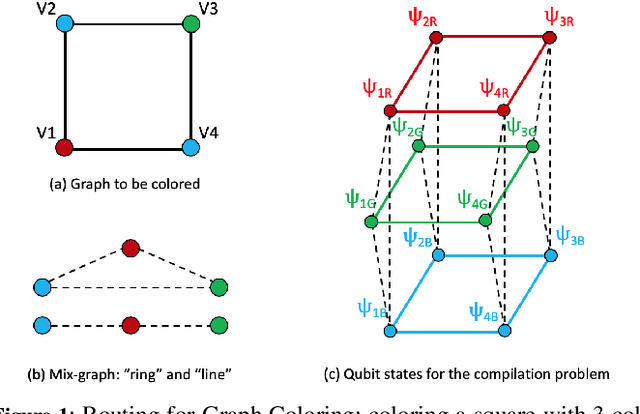
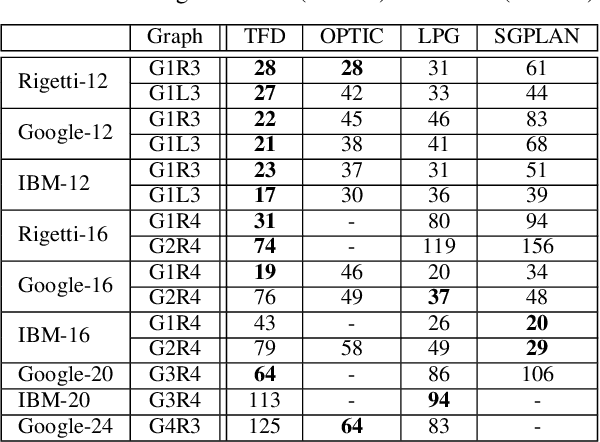
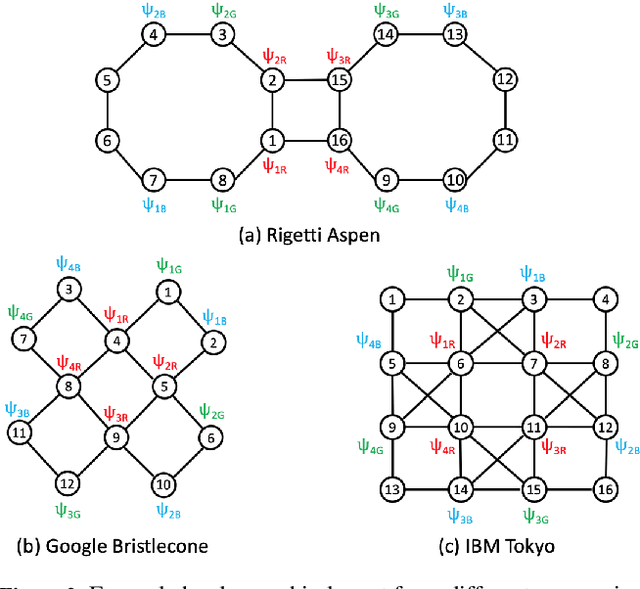
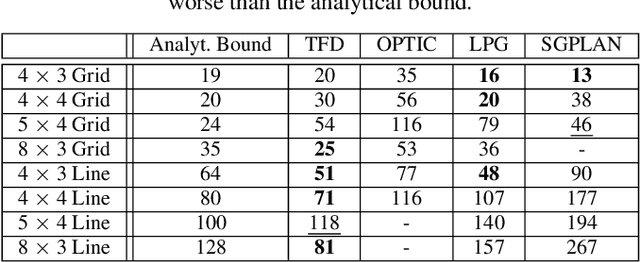
The problem of compiling general quantum algorithms for implementation on near-term quantum processors has been introduced to the AI community. Previous work demonstrated that temporal planning is an attractive approach for part of this compilationtask, specifically, the routing of circuits that implement the Quantum Alternating Operator Ansatz (QAOA) applied to the MaxCut problem on a quantum processor architecture. In this paper, we extend the earlier work to route circuits that implement QAOA for Graph Coloring problems. QAOA for coloring requires execution of more, and more complex, operations on the chip, which makes routing a more challenging problem. We evaluate the approach on state-of-the-art hardware architectures from leading quantum computing companies. Additionally, we apply a planning approach to qubit initialization. Our empirical evaluation shows that temporal planning compares well to reasonable analytic upper bounds, and that solving qubit initialization with a classical planner generally helps temporal planners in finding shorter-makespan compilations for QAOA for Graph Coloring. These advances suggest that temporal planning can be an effective approach for more complex quantum computing algorithms and architectures.
* 8 pages, 4 tables, 5 figures
Comparing and Integrating Constraint Programming and Temporal Planning for Quantum Circuit Compilation
Mar 19, 2018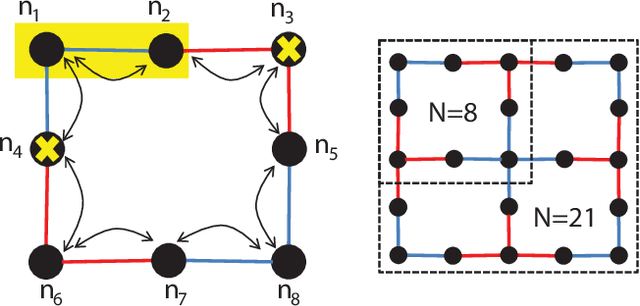
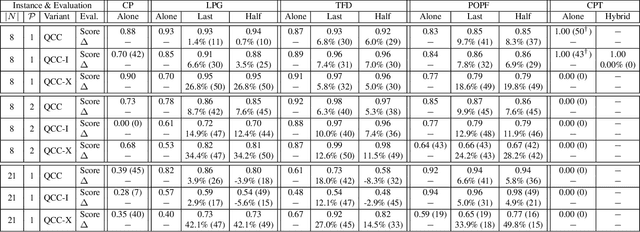
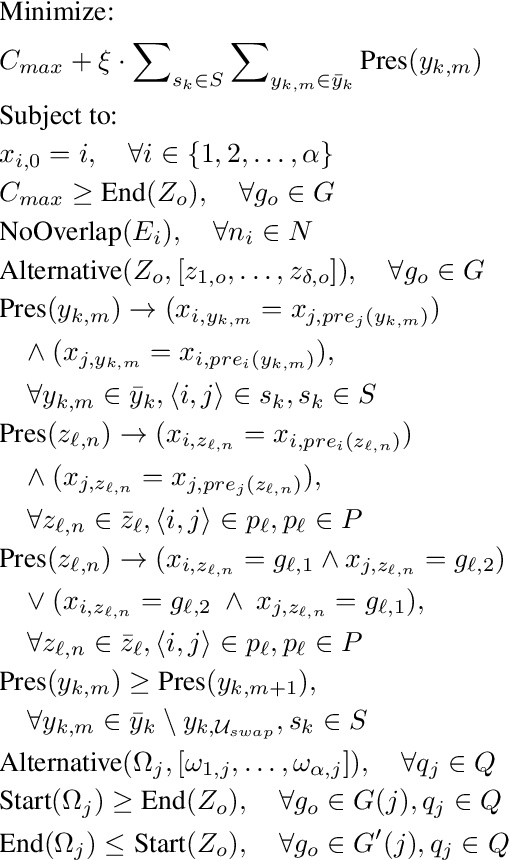
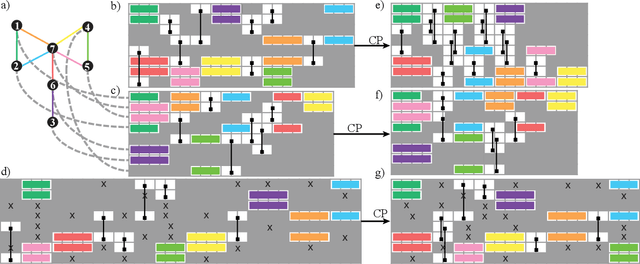
Recently, the makespan-minimization problem of compiling a general class of quantum algorithms into near-term quantum processors has been introduced to the AI community. The research demonstrated that temporal planning is a strong approach for a class of quantum circuit compilation (QCC) problems. In this paper, we explore the use of constraint programming (CP) as an alternative and complementary approach to temporal planning. We extend previous work by introducing two new problem variations that incorporate important characteristics identified by the quantum computing community. We apply temporal planning and CP to the baseline and extended QCC problems as both stand-alone and hybrid approaches. Our hybrid methods use solutions found by temporal planning to warm start CP, leveraging the ability of the former to find satisficing solutions to problems with a high degree of task optionality, an area that CP typically struggles with. The CP model, benefiting from inferred bounds on planning horizon length and task counts provided by the warm start, is then used to find higher quality solutions. Our empirical evaluation indicates that while stand-alone CP is only competitive for the smallest problems, CP in our hybridization with temporal planning out-performs stand-alone temporal planning in the majority of problem classes.
Compiling quantum circuits to realistic hardware architectures using temporal planners
Dec 21, 2017
To run quantum algorithms on emerging gate-model quantum hardware, quantum circuits must be compiled to take into account constraints on the hardware. For near-term hardware, with only limited means to mitigate decoherence, it is critical to minimize the duration of the circuit. We investigate the application of temporal planners to the problem of compiling quantum circuits to newly emerging quantum hardware. While our approach is general, we focus on compiling to superconducting hardware architectures with nearest neighbor constraints. Our initial experiments focus on compiling Quantum Alternating Operator Ansatz (QAOA) circuits whose high number of commuting gates allow great flexibility in the order in which the gates can be applied. That freedom makes it more challenging to find optimal compilations but also means there is a greater potential win from more optimized compilation than for less flexible circuits. We map this quantum circuit compilation problem to a temporal planning problem, and generated a test suite of compilation problems for QAOA circuits of various sizes to a realistic hardware architecture. We report compilation results from several state-of-the-art temporal planners on this test set. This early empirical evaluation demonstrates that temporal planning is a viable approach to quantum circuit compilation.
* updated manuscript, more planners and results
Using Collective Intelligence to Route Internet Traffic
May 10, 1999
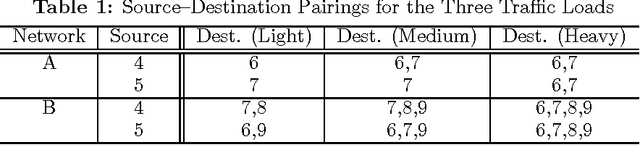
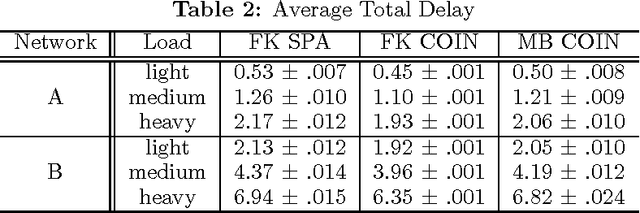
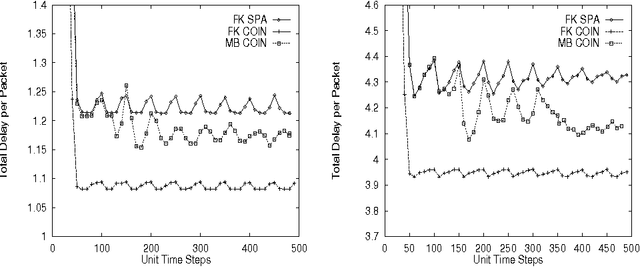
A COllective INtelligence (COIN) is a set of interacting reinforcement learning (RL) algorithms designed in an automated fashion so that their collective behavior optimizes a global utility function. We summarize the theory of COINs, then present experiments using that theory to design COINs to control internet traffic routing. These experiments indicate that COINs outperform all previously investigated RL-based, shortest path routing algorithms.
* 7 pages