 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBimanual XR Specification of Relative and Absolute Assembly Hierarchies for Teleoperation
Mar 02, 2026We present a bimanual XR interaction approach for specifying remote assembly tasks as hierarchies of relative and absolute object constraints that specify high-level teleoperation goals for robots. Grabbing one object in each hand creates a constraint group (visualized as a hull) and groups can be nested into hierarchies. Each group can be relative (with a robot-specifiable 6DoF pose) or absolute (with an author-specified fixed 6DoF pose) in relation to its parent. A relative group specifies a subassembly that can be constructed at a location chosen by the robot software for efficiency rather than mandated by the user.
Scene Editing as Teleoperation: A Case Study in 6DoF Kit Assembly
Oct 09, 2021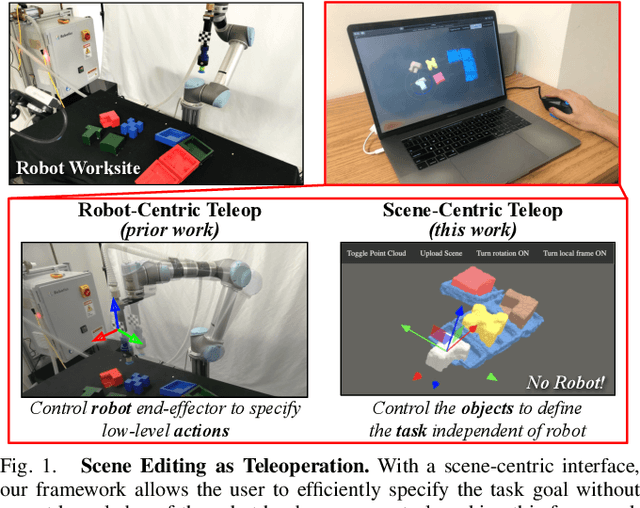
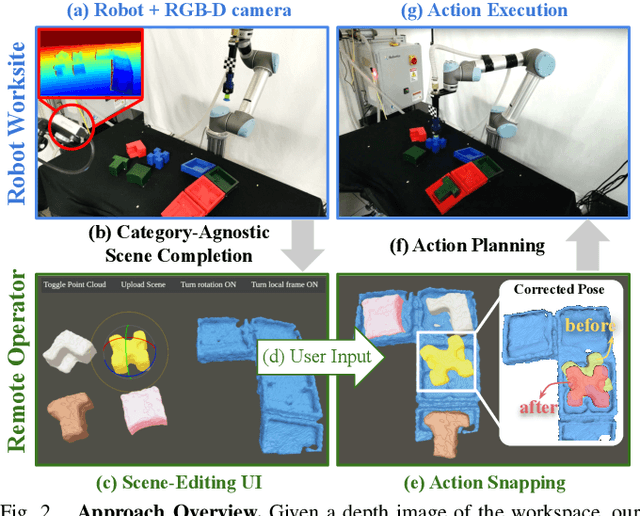

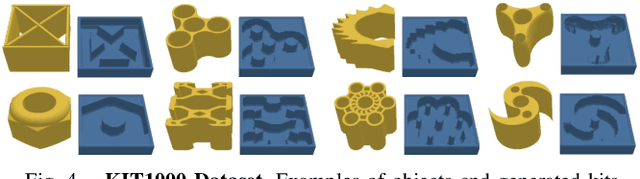
Studies in robot teleoperation have been centered around action specifications -- from continuous joint control to discrete end-effector pose control. However, these robot-centric interfaces often require skilled operators with extensive robotics expertise. To make teleoperation accessible to non-expert users, we propose the framework "Scene Editing as Teleoperation" (SEaT), where the key idea is to transform the traditional "robot-centric" interface into a "scene-centric" interface -- instead of controlling the robot, users focus on specifying the task's goal by manipulating digital twins of the real-world objects. As a result, a user can perform teleoperation without any expert knowledge of the robot hardware. To achieve this goal, we utilize a category-agnostic scene-completion algorithm that translates the real-world workspace (with unknown objects) into a manipulable virtual scene representation and an action-snapping algorithm that refines the user input before generating the robot's action plan. To train the algorithms, we procedurally generated a large-scale, diverse kit-assembly dataset that contains object-kit pairs that mimic real-world object-kitting tasks. Our experiments in simulation and on a real-world system demonstrate that our framework improves both the efficiency and success rate for 6DoF kit-assembly tasks. A user study demonstrates that SEaT framework participants achieve a higher task success rate and report a lower subjective workload compared to an alternative robot-centric interface. Video can be found at https://www.youtube.com/watch?v=-NdR3mkPbQQ .