 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRLDX-1 Technical Report
May 05, 2026While Vision-Language-Action models (VLAs) have shown remarkable progress toward human-like generalist robotic policies through the versatile intelligence (i.e. broad scene understanding and language-conditioned generalization) inherited from pre-trained Vision-Language Models, they still struggle with complex real-world tasks requiring broader functional capabilities (e.g. motion awareness, memory-aware decision making, and physical sensing). To address this, we introduce RLDX-1, a general-purpose robotic policy for dexterous manipulation built on the Multi-Stream Action Transformer (MSAT), an architecture that unifies these capabilities by integrating heterogeneous modalities through modality-specific streams with cross-modal joint self-attention. RLDX-1 further combines this architecture with system-level design choices, including synthesizing training data for rare manipulation scenarios, learning procedures specialized for human-like manipulation, and inference optimizations for real-time deployment. Through empirical evaluation, we show that RLDX-1 consistently outperforms recent frontier VLAs (e.g. $π_{0.5}$ and GR00T N1.6) across both simulation benchmarks and real-world tasks that require broad functional capabilities beyond general versatility. In particular, RLDX-1 shows superiority in ALLEX humanoid tasks by achieving success rates of 86.8% while $π_{0.5}$ and GR00T N1.6 achieve around 40%, highlighting the ability of RLDX-1 to control a high-DoF humanoid robot under diverse functional demands. Together, these results position RLDX-1 as a promising step toward reliable VLAs for complex, contact-rich, and dynamic real-world dexterous manipulation.
HiFi-GAN: Generative Adversarial Networks for Efficient and High Fidelity Speech Synthesis
Oct 23, 2020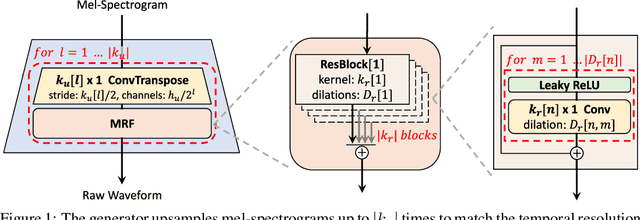
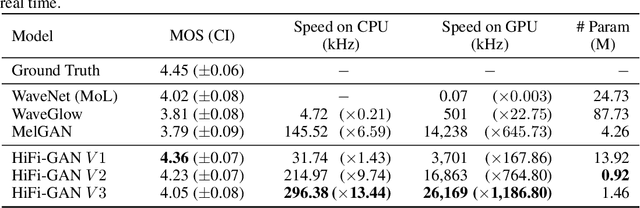
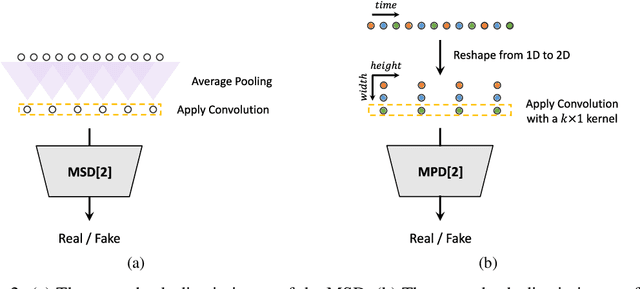
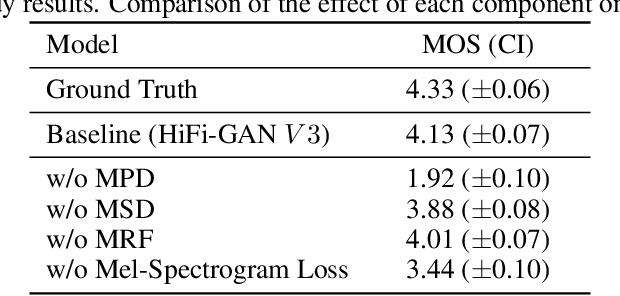
Several recent work on speech synthesis have employed generative adversarial networks (GANs) to produce raw waveforms. Although such methods improve the sampling efficiency and memory usage, their sample quality has not yet reached that of autoregressive and flow-based generative models. In this work, we propose HiFi-GAN, which achieves both efficient and high-fidelity speech synthesis. As speech audio consists of sinusoidal signals with various periods, we demonstrate that modeling periodic patterns of an audio is crucial for enhancing sample quality. A subjective human evaluation (mean opinion score, MOS) of a single speaker dataset indicates that our proposed method demonstrates similarity to human quality while generating 22.05 kHz high-fidelity audio 167.9 times faster than real-time on a single V100 GPU. We further show the generality of HiFi-GAN to the mel-spectrogram inversion of unseen speakers and end-to-end speech synthesis. Finally, a small footprint version of HiFi-GAN generates samples 13.4 times faster than real-time on CPU with comparable quality to an autoregressive counterpart.
Revisiting Modularized Multilingual NMT to Meet Industrial Demands
Oct 19, 2020
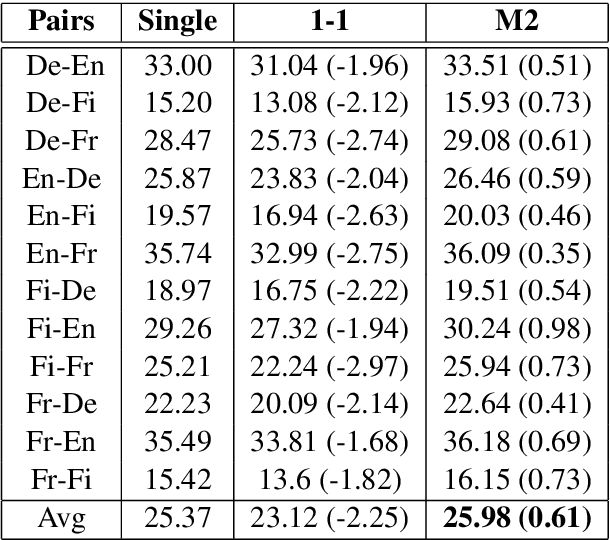
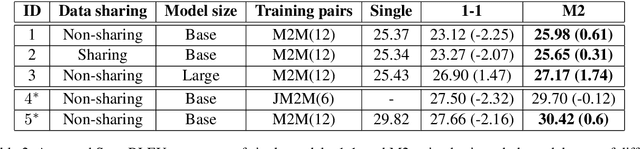
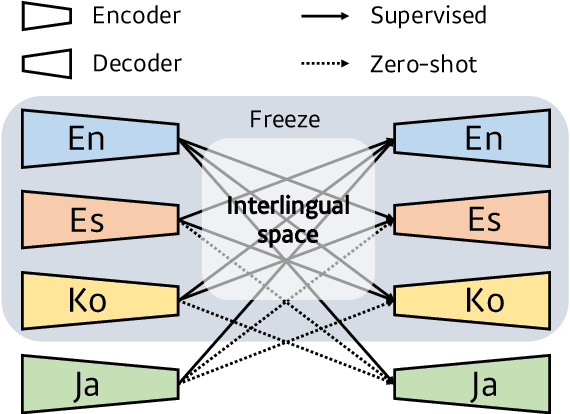
The complete sharing of parameters for multilingual translation (1-1) has been the mainstream approach in current research. However, degraded performance due to the capacity bottleneck and low maintainability hinders its extensive adoption in industries. In this study, we revisit the multilingual neural machine translation model that only share modules among the same languages (M2) as a practical alternative to 1-1 to satisfy industrial requirements. Through comprehensive experiments, we identify the benefits of multi-way training and demonstrate that the M2 can enjoy these benefits without suffering from the capacity bottleneck. Furthermore, the interlingual space of the M2 allows convenient modification of the model. By leveraging trained modules, we find that incrementally added modules exhibit better performance than singly trained models. The zero-shot performance of the added modules is even comparable to supervised models. Our findings suggest that the M2 can be a competent candidate for multilingual translation in industries.