 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinding Needles in Haystack: Formal Generative Models for Efficient Massive Parallel Simulations
Jan 03, 2023The increase in complexity of autonomous systems is accompanied by a need of data-driven development and validation strategies. Advances in computer graphics and cloud clusters have opened the way to massive parallel high fidelity simulations to qualitatively address the large number of operational scenarios. However, exploration of all possible scenarios is still prohibitively expensive and outcomes of scenarios are generally unknown apriori. To this end, the authors propose a method based on bayesian optimization to efficiently learn generative models on scenarios that would deliver desired outcomes (e.g. collisions) with high probability. The methodology is integrated in an end-to-end framework, which uses the OpenSCENARIO standard to describe scenarios, and deploys highly configurable digital twins of the scenario participants on a Virtual Test Bed cluster.
Flexible Disaster Response of Tomorrow -- Final Presentation and Evaluation of the CENTAURO System
Sep 19, 2019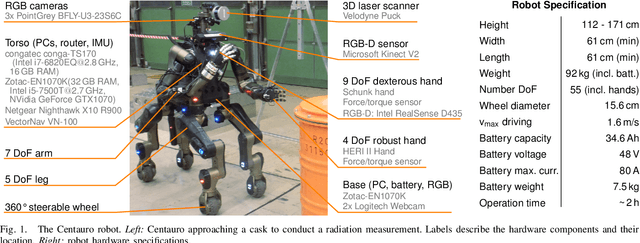
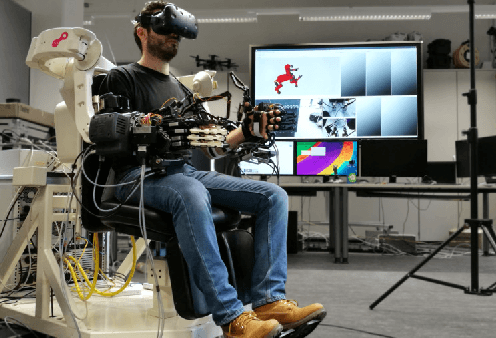
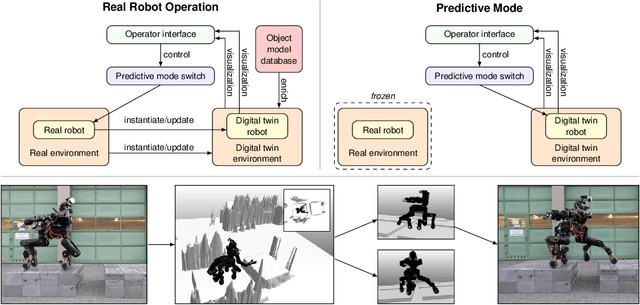
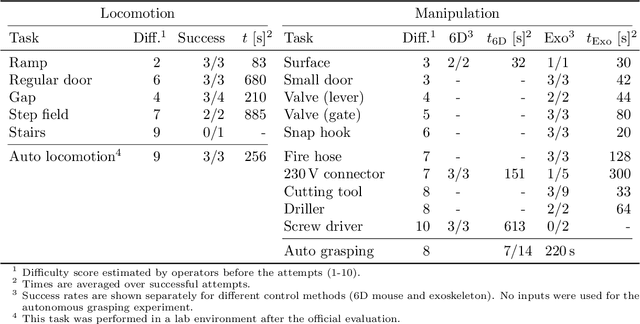
Mobile manipulation robots have high potential to support rescue forces in disaster-response missions. Despite the difficulties imposed by real-world scenarios, robots are promising to perform mission tasks from a safe distance. In the CENTAURO project, we developed a disaster-response system which consists of the highly flexible Centauro robot and suitable control interfaces including an immersive tele-presence suit and support-operator controls on different levels of autonomy. In this article, we give an overview of the final CENTAURO system. In particular, we explain several high-level design decisions and how those were derived from requirements and extensive experience of Kerntechnische Hilfsdienst GmbH, Karlsruhe, Germany (KHG). We focus on components which were recently integrated and report about a systematic evaluation which demonstrated system capabilities and revealed valuable insights.
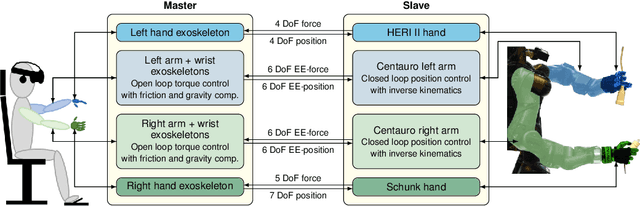
Remote Mobile Manipulation with the Centauro Robot: Full-body Telepresence and Autonomous Operator Assistance
Aug 05, 2019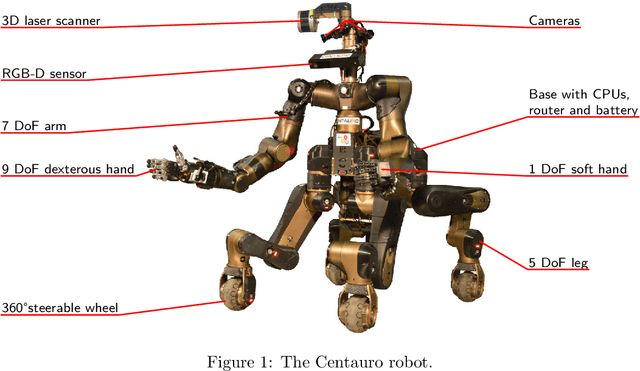
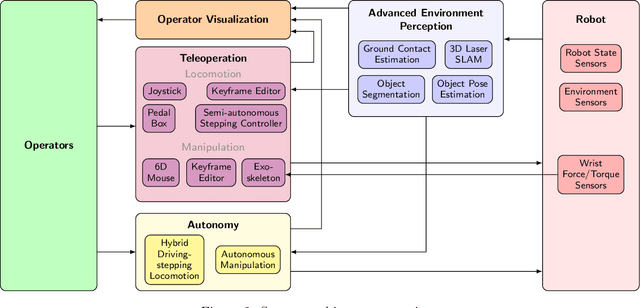
Solving mobile manipulation tasks in inaccessible and dangerous environments is an important application of robots to support humans. Example domains are construction and maintenance of manned and unmanned stations on the moon and other planets. Suitable platforms require flexible and robust hardware, a locomotion approach that allows for navigating a wide variety of terrains, dexterous manipulation capabilities, and respective user interfaces. We present the CENTAURO system which has been designed for these requirements and consists of the Centauro robot and a set of advanced operator interfaces with complementary strength enabling the system to solve a wide range of realistic mobile manipulation tasks. The robot possesses a centaur-like body plan and is driven by torque-controlled compliant actuators. Four articulated legs ending in steerable wheels allow for omnidirectional driving as well as for making steps. An anthropomorphic upper body with two arms ending in five-finger hands enables human-like manipulation. The robot perceives its environment through a suite of multimodal sensors. The resulting platform complexity goes beyond the complexity of most known systems which puts the focus on a suitable operator interface. An operator can control the robot through a telepresence suit, which allows for flexibly solving a large variety of mobile manipulation tasks. Locomotion and manipulation functionalities on different levels of autonomy support the operation. The proposed user interfaces enable solving a wide variety of tasks without previous task-specific training. The integrated system is evaluated in numerous teleoperated experiments that are described along with lessons learned.