 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Vision-Based Deep Reinforcement Learning for Robotic Motion Control
Nov 13, 2015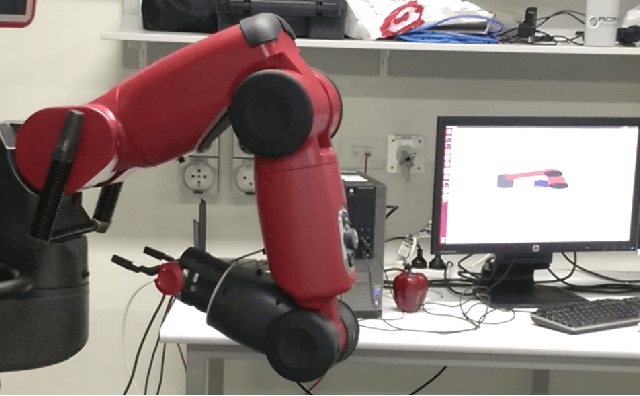
This paper introduces a machine learning based system for controlling a robotic manipulator with visual perception only. The capability to autonomously learn robot controllers solely from raw-pixel images and without any prior knowledge of configuration is shown for the first time. We build upon the success of recent deep reinforcement learning and develop a system for learning target reaching with a three-joint robot manipulator using external visual observation. A Deep Q Network (DQN) was demonstrated to perform target reaching after training in simulation. Transferring the network to real hardware and real observation in a naive approach failed, but experiments show that the network works when replacing camera images with synthetic images.