 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKCFRC: Kinematic Collision-Aware Foothold Reachability Criteria for Legged Locomotion
Feb 24, 2026Legged robots face significant challenges in navigating complex environments, as they require precise real-time decisions for foothold selection and contact planning. While existing research has explored methods to select footholds based on terrain geometry or kinematics, a critical gap remains: few existing methods efficiently validate the existence of a non-collision swing trajectory. This paper addresses this gap by introducing KCFRC, a novel approach for efficient foothold reachability analysis. We first formally define the foothold reachability problem and establish a sufficient condition for foothold reachability. Based on this condition, we develop the KCFRC algorithm, which enables robots to validate foothold reachability in real time. Our experimental results demonstrate that KCFRC achieves remarkable time efficiency, completing foothold reachability checks for a single leg across 900 potential footholds in an average of 2 ms. Furthermore, we show that KCFRC can accelerate trajectory optimization and is particularly beneficial for contact planning in confined spaces, enhancing the adaptability and robustness of legged robots in challenging environments.
Predicting Terrain Mechanical Properties in Sight for Planetary Rovers with Semantic Clues
Nov 03, 2020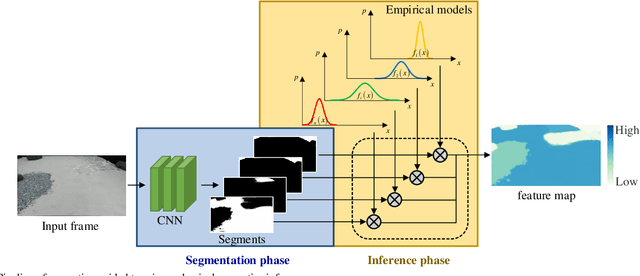
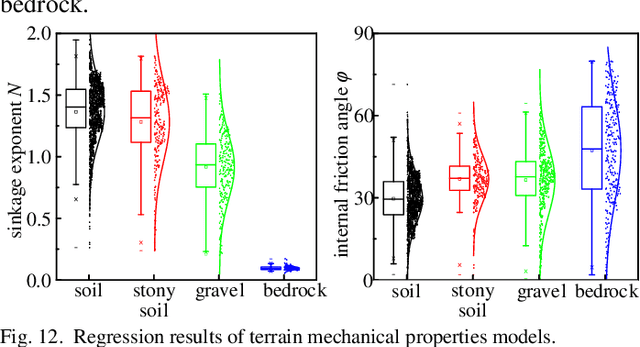
Non-geometric mobility hazards such as rover slippage and sinkage posing great challenges to costly planetary missions are closely related to the mechanical properties of terrain. In-situ proprioceptive processes for rovers to estimate terrain mechanical properties need to experience different slip as well as sinkage and are helpless to untraversed regions. This paper proposes to predict terrain mechanical properties with vision in the distance, which expands the sensing range to the whole view and can partly halt potential slippage and sinkage hazards in the planning stage. A semantic-based method is designed to predict bearing and shearing properties of terrain in two stages connected with semantic clues. The former segmentation phase segments terrain with a light-weighted network promising to be applied onboard with competitive 93% accuracy and high recall rate over 96%, while the latter inference phase predicts terrain properties in a quantitative manner based on human-like inference principles. The prediction results in several test routes are 12.5% and 10.8% in full-scale error and help to plan appropriate strategies to avoid suffering non-geometric hazards.