 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMap-Mono-Ego: Map-Grounded Global Human Pose Estimation from Monocular Egocentric Video
May 20, 2026Monocular egocentric human pose estimation is essential for ubiquitous activity monitoring. However, understanding the user's absolute location within the environment remains a challenge. Existing methods primarily focus on relative motion from an initial position, and tend not to account for the wearer's absolute location within an environment. Furthermore, inherent scale ambiguity in monocular vision leads to severe translational drift, limiting long-term tracking without specialized multi-sensor hardware. To address this, we propose MapMonoEgo, a novel framework achieving globally consistent human pose estimation solely from a monocular camera by leveraging a pre-scanned 3D point cloud. We also introduce AIST-Living dataset, a new dataset pairing egocentric video with ground-truth motion in a scanned environment. Experiments demonstrate that our approach significantly outperforms the state-of-the-art baseline, proving its utility for practical monitoring tasks without specialized hardware.
Profile-Specific 3DMM Regression from a Single Lateral Face Image
May 03, 2026Single-image 3D face reconstruction is a core problem in computer vision, with important clinical applications such as cephalometric landmark analysis in orthodontics. Traditionally, this analysis relies on lateral X-ray imaging; however, frequent X-ray exposure is impractical due to radiation concerns. While recent research has explored detecting landmarks from lateral RGB images as an alternative, existing methods typically rely on 2D features such as the eyes, mouth, ears, and boundary silhouettes, failing to fully exploit the underlying 3D facial geometry spanning the facial profile and jawline, which is essential for accurate diagnosis. Meanwhile, although 3D face reconstruction from frontal views has seen significant progress, most learning-based 3D morphable model (3DMM) regressors are developed and benchmarked on near-frontal images, where appearance cues are abundant. In extreme profile views (yaw $\approx 90^\circ$), much of the face is occluded, and the available signal is dominated by boundary cues, making accurate 3D reconstruction challenging. In this paper, we bridge this gap with geometry-conditioned synthetic data and a simple profile-specific FLAME regression baseline for single lateral images. We introduce ProfileSynth, a dataset created by sampling FLAME shape and pose parameters in extreme yaw ranges and generating photorealistic profile images using a diffusion model conditioned on depth and normal maps. We further study a profile-specific baseline with visibility-aware jawline regularization. Our framework provides a practical baseline for "profile $\times$ 3DMM" reconstruction and a promising foundation for more accurate, non-invasive cephalometric analysis from lateral RGB images.
Learning from Synthetic Data via Provenance-Based Input Gradient Guidance
Apr 03, 2026Learning methods using synthetic data have attracted attention as an effective approach for increasing the diversity of training data while reducing collection costs, thereby improving the robustness of model discrimination. However, many existing methods improve robustness only indirectly through the diversification of training samples and do not explicitly teach the model which regions in the input space truly contribute to discrimination; consequently, the model may learn spurious correlations caused by synthesis biases and artifacts. Motivated by this limitation, this paper proposes a learning framework that uses provenance information obtained during the training data synthesis process, indicating whether each region in the input space originates from the target object, as an auxiliary supervisory signal to promote the acquisition of representations focused on target regions. Specifically, input gradients are decomposed based on information about target and non-target regions during synthesis, and input gradient guidance is introduced to suppress gradients over non-target regions. This suppresses the model's reliance on non-target regions and directly promotes the learning of discriminative representations for target regions. Experiments demonstrate the effectiveness and generality of the proposed method across multiple tasks and modalities, including weakly supervised object localization, spatio-temporal action localization, and image classification.
Ground Reaction Inertial Poser: Physics-based Human Motion Capture from Sparse IMUs and Insole Pressure Sensors
Mar 17, 2026We propose Ground Reaction Inertial Poser (GRIP), a method that reconstructs physically plausible human motion using four wearable devices. Unlike conventional IMU-only approaches, GRIP combines IMU signals with foot pressure data to capture both body dynamics and ground interactions. Furthermore, rather than relying solely on kinematic estimation, GRIP uses a digital twin of a person, in the form of a synthetic humanoid in a physics simulator, to reconstruct realistic and physically plausible motion. At its core, GRIP consists of two modules: KinematicsNet, which estimates body poses and velocities from sensor data, and DynamicsNet, which controls the humanoid in the simulator using the residual between the KinematicsNet prediction and the simulated humanoid state. To enable robust training and fair evaluation, we introduce a large-scale dataset, Pressure and Inertial Sensing for Human Motion and Interaction (PRISM), that captures diverse human motions with synchronized IMUs and insole pressure sensors. Experimental results show that GRIP outperforms existing IMU-only and IMU-pressure fusion methods across all evaluated datasets, achieving higher global pose accuracy and improved physical consistency.
VIOLA: Towards Video In-Context Learning with Minimal Annotations
Jan 22, 2026Generalizing Multimodal Large Language Models (MLLMs) to novel video domains is essential for real-world deployment but remains challenging due to the scarcity of labeled data. While In-Context Learning (ICL) offers a training-free adaptation path, standard methods rely on large annotated pools, which are often impractical in specialized environments like industrial or surgical settings since they require the experts' annotations. To bridge this gap, we introduce VIOLA (Video In-cOntext Learning with minimal Annotation), a label-efficient framework that synergizes minimal expert supervision with abundant unlabeled data. First, to maximize the efficiency of a strict annotation budget, we propose density-uncertainty-weighted sampling. Unlike standard diversity or uncertainty strategies that risk selecting visual outliers, our method leverages density estimation to identify samples that are simultaneously diverse, representative, and informative. Second, to utilize the remaining unlabeled data without noise propagation, we construct a hybrid pool and introduce confidence-aware retrieval and confidence-aware prompting. These mechanisms explicitly model label reliability, retrieving demonstrations based on a composite score of similarity and confidence while enabling the MLLM to adaptively distinguish between verified ground truths and noisy pseudo-labels. Extensive experiments across nine diverse benchmarks using four MLLMs demonstrate that our framework significantly outperforms various baselines in low-resource settings, achieving robust adaptation with minimal annotation costs.
Prime and Reach: Synthesising Body Motion for Gaze-Primed Object Reach
Dec 18, 2025



Human motion generation is a challenging task that aims to create realistic motion imitating natural human behaviour. We focus on the well-studied behaviour of priming an object/location for pick up or put down -- that is, the spotting of an object/location from a distance, known as gaze priming, followed by the motion of approaching and reaching the target location. To that end, we curate, for the first time, 23.7K gaze-primed human motion sequences for reaching target object locations from five publicly available datasets, i.e., HD-EPIC, MoGaze, HOT3D, ADT, and GIMO. We pre-train a text-conditioned diffusion-based motion generation model, then fine-tune it conditioned on goal pose or location, on our curated sequences. Importantly, we evaluate the ability of the generated motion to imitate natural human movement through several metrics, including the 'Reach Success' and a newly introduced 'Prime Success' metric. On the largest dataset, HD-EPIC, our model achieves 60% prime success and 89% reach success when conditioned on the goal object location.
Disturbance-Free Surgical Video Generation from Multi-Camera Shadowless Lamps for Open Surgery
Dec 09, 2025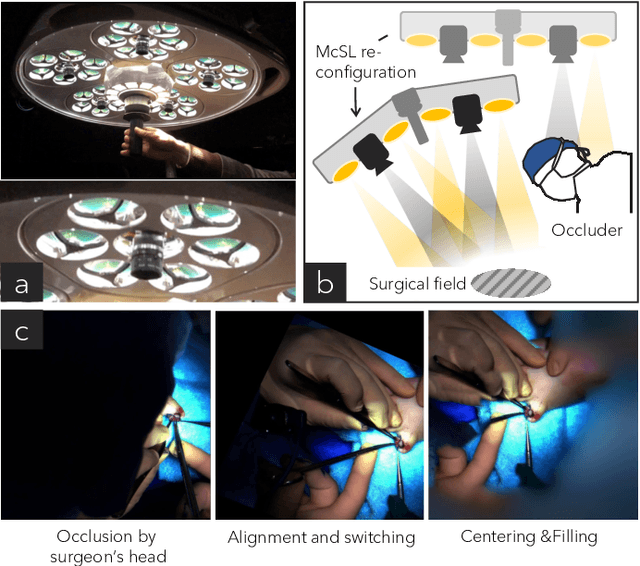
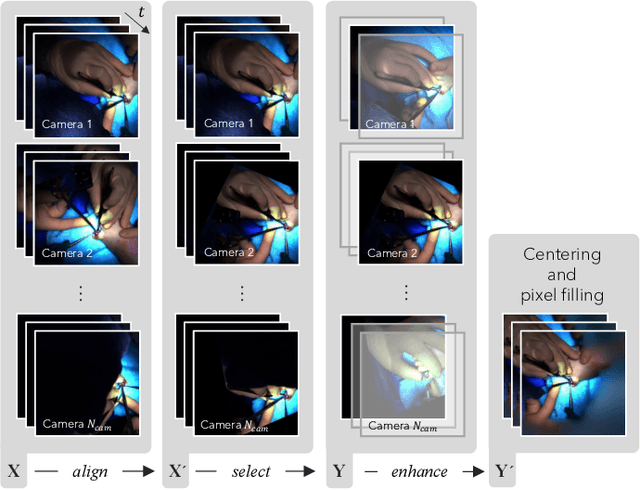
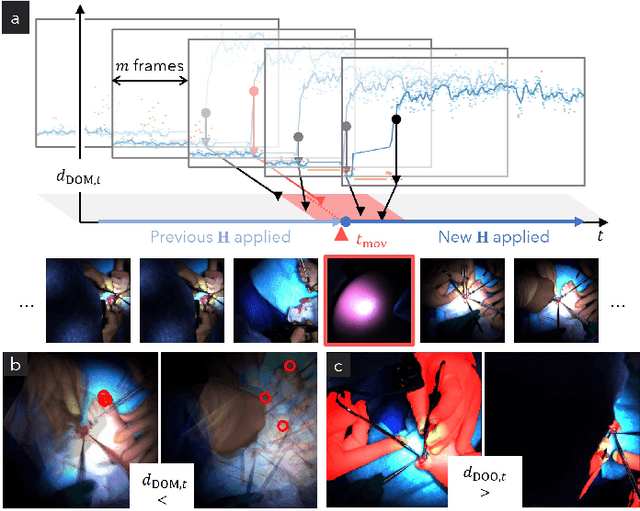
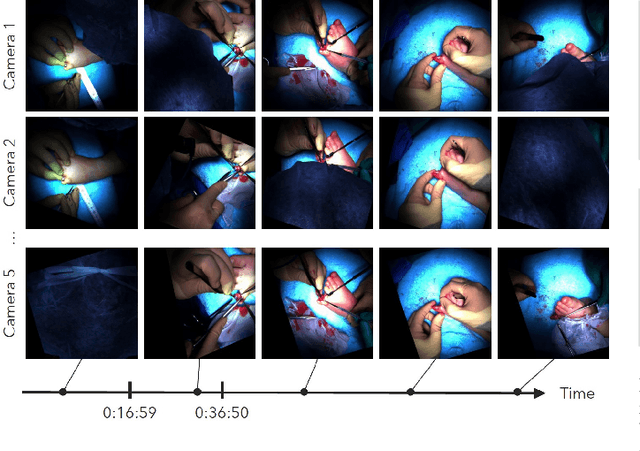
Video recordings of open surgeries are greatly required for education and research purposes. However, capturing unobstructed videos is challenging since surgeons frequently block the camera field of view. To avoid occlusion, the positions and angles of the camera must be frequently adjusted, which is highly labor-intensive. Prior work has addressed this issue by installing multiple cameras on a shadowless lamp and arranging them to fully surround the surgical area. This setup increases the chances of some cameras capturing an unobstructed view. However, manual image alignment is needed in post-processing since camera configurations change every time surgeons move the lamp for optimal lighting. This paper aims to fully automate this alignment task. The proposed method identifies frames in which the lighting system moves, realigns them, and selects the camera with the least occlusion to generate a video that consistently presents the surgical field from a fixed perspective. A user study involving surgeons demonstrated that videos generated by our method were superior to those produced by conventional methods in terms of the ease of confirming the surgical area and the comfort during video viewing. Additionally, our approach showed improvements in video quality over existing techniques. Furthermore, we implemented several synthesis options for the proposed view-synthesis method and conducted a user study to assess surgeons' preferences for each option.
Hand Held Multi-Object Tracking Dataset in American Football
Nov 12, 2025



Multi-Object Tracking (MOT) plays a critical role in analyzing player behavior from videos, enabling performance evaluation. Current MOT methods are often evaluated using publicly available datasets. However, most of these focus on everyday scenarios such as pedestrian tracking or are tailored to specific sports, including soccer and basketball. Despite the inherent challenges of tracking players in American football, such as frequent occlusion and physical contact, no standardized dataset has been publicly available, making fair comparisons between methods difficult. To address this gap, we constructed the first dedicated detection and tracking dataset for the American football players and conducted a comparative evaluation of various detection and tracking methods. Our results demonstrate that accurate detection and tracking can be achieved even in crowded scenarios. Fine-tuning detection models improved performance over pre-trained models. Furthermore, when these fine-tuned detectors and re-identification models were integrated into tracking systems, we observed notable improvements in tracking accuracy compared to existing approaches. This work thus enables robust detection and tracking of American football players in challenging, high-density scenarios previously underserved by conventional methods.
Human Preference-Aligned Concept Customization Benchmark via Decomposed Evaluation
Sep 03, 2025



Evaluating concept customization is challenging, as it requires a comprehensive assessment of fidelity to generative prompts and concept images. Moreover, evaluating multiple concepts is considerably more difficult than evaluating a single concept, as it demands detailed assessment not only for each individual concept but also for the interactions among concepts. While humans can intuitively assess generated images, existing metrics often provide either overly narrow or overly generalized evaluations, resulting in misalignment with human preference. To address this, we propose Decomposed GPT Score (D-GPTScore), a novel human-aligned evaluation method that decomposes evaluation criteria into finer aspects and incorporates aspect-wise assessments using Multimodal Large Language Model (MLLM). Additionally, we release Human Preference-Aligned Concept Customization Benchmark (CC-AlignBench), a benchmark dataset containing both single- and multi-concept tasks, enabling stage-wise evaluation across a wide difficulty range -- from individual actions to multi-person interactions. Our method significantly outperforms existing approaches on this benchmark, exhibiting higher correlation with human preferences. This work establishes a new standard for evaluating concept customization and highlights key challenges for future research. The benchmark and associated materials are available at https://github.com/ReinaIshikawa/D-GPTScore.
SoccerNet 2025 Challenges Results
Aug 26, 2025The SoccerNet 2025 Challenges mark the fifth annual edition of the SoccerNet open benchmarking effort, dedicated to advancing computer vision research in football video understanding. This year's challenges span four vision-based tasks: (1) Team Ball Action Spotting, focused on detecting ball-related actions in football broadcasts and assigning actions to teams; (2) Monocular Depth Estimation, targeting the recovery of scene geometry from single-camera broadcast clips through relative depth estimation for each pixel; (3) Multi-View Foul Recognition, requiring the analysis of multiple synchronized camera views to classify fouls and their severity; and (4) Game State Reconstruction, aimed at localizing and identifying all players from a broadcast video to reconstruct the game state on a 2D top-view of the field. Across all tasks, participants were provided with large-scale annotated datasets, unified evaluation protocols, and strong baselines as starting points. This report presents the results of each challenge, highlights the top-performing solutions, and provides insights into the progress made by the community. The SoccerNet Challenges continue to serve as a driving force for reproducible, open research at the intersection of computer vision, artificial intelligence, and sports. Detailed information about the tasks, challenges, and leaderboards can be found at https://www.soccer-net.org, with baselines and development kits available at https://github.com/SoccerNet.