 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Energy-Efficient Edge Coprocessor for Neural Rendering with Explicit Data Reuse Strategies
Oct 09, 2025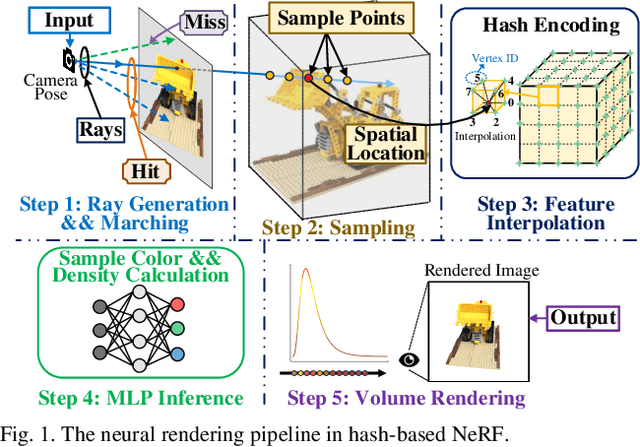
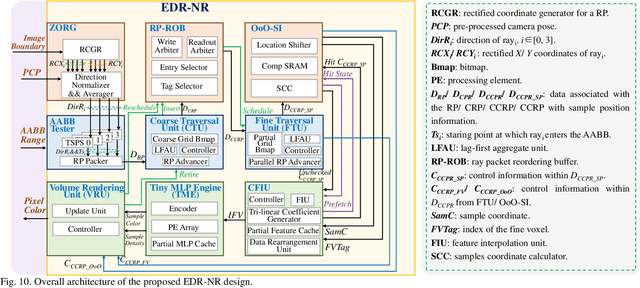
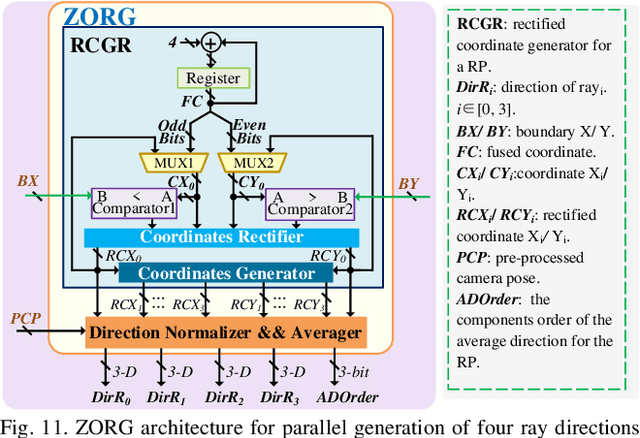
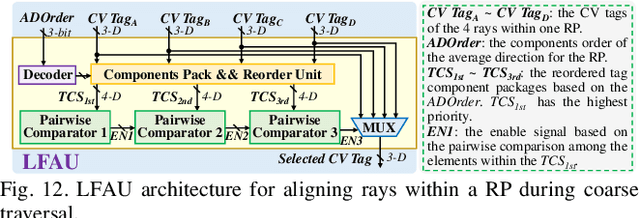
Neural radiance fields (NeRF) have transformed 3D reconstruction and rendering, facilitating photorealistic image synthesis from sparse viewpoints. This work introduces an explicit data reuse neural rendering (EDR-NR) architecture, which reduces frequent external memory accesses (EMAs) and cache misses by exploiting the spatial locality from three phases, including rays, ray packets (RPs), and samples. The EDR-NR architecture features a four-stage scheduler that clusters rays on the basis of Z-order, prioritize lagging rays when ray divergence happens, reorders RPs based on spatial proximity, and issues samples out-of-orderly (OoO) according to the availability of on-chip feature data. In addition, a four-tier hierarchical RP marching (HRM) technique is integrated with an axis-aligned bounding box (AABB) to facilitate spatial skipping (SS), reducing redundant computations and improving throughput. Moreover, a balanced allocation strategy for feature storage is proposed to mitigate SRAM bank conflicts. Fabricated using a 40 nm process with a die area of 10.5 mmX, the EDR-NR chip demonstrates a 2.41X enhancement in normalized energy efficiency, a 1.21X improvement in normalized area efficiency, a 1.20X increase in normalized throughput, and a 53.42% reduction in on-chip SRAM consumption compared to state-of-the-art accelerators.
Advanced Mapping Robot and High-Resolution Dataset
Jul 23, 2020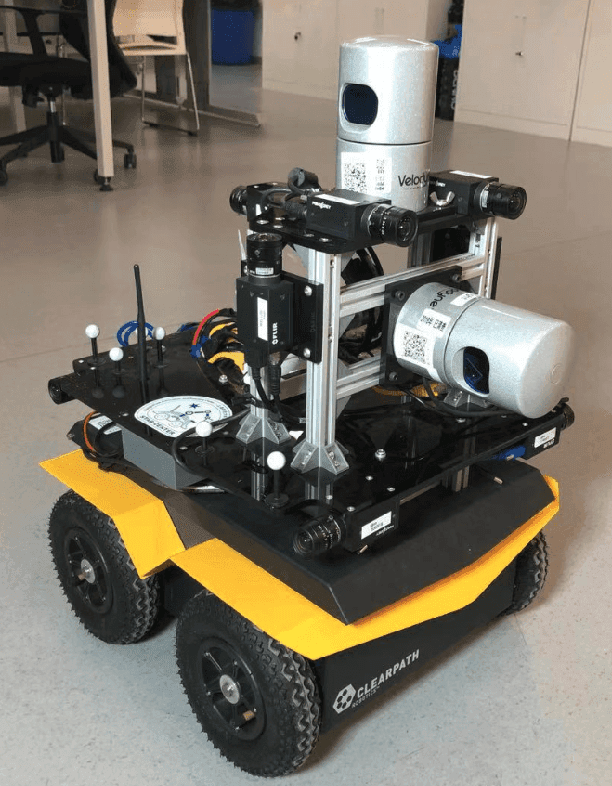
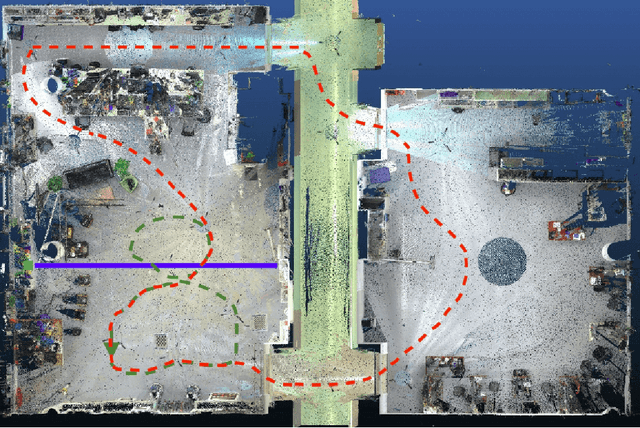
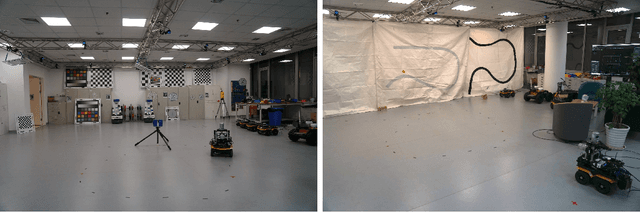

This paper presents a fully hardware synchronized mapping robot with support for a hardware synchronized external tracking system, for super-precise timing and localization. Nine high-resolution cameras and two 32-beam 3D Lidars were used along with a professional, static 3D scanner for ground truth map collection. With all the sensors calibrated on the mapping robot, three datasets are collected to evaluate the performance of mapping algorithms within a room and between rooms. Based on these datasets we generate maps and trajectory data, which is then fed into evaluation algorithms. We provide the datasets for download and the mapping and evaluation procedures are made in a very easily reproducible manner for maximum comparability. We have also conducted a survey on available robotics-related datasets and compiled a big table with those datasets and a number of properties of them.
Towards Generation and Evaluation of Comprehensive Mapping Robot Datasets
May 23, 2019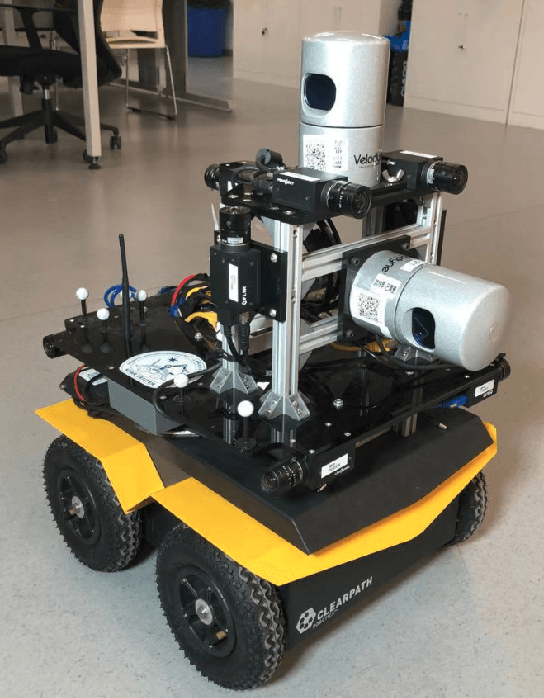
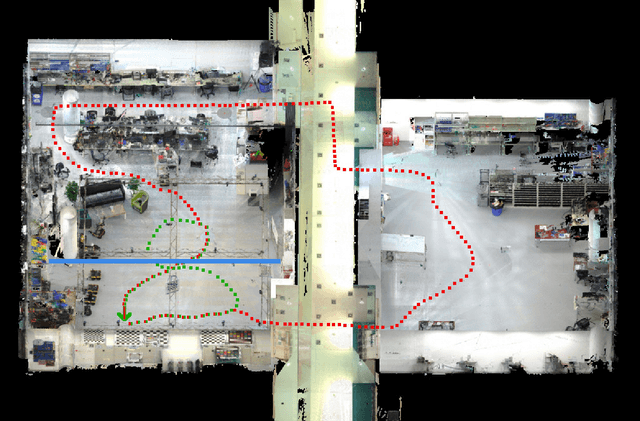
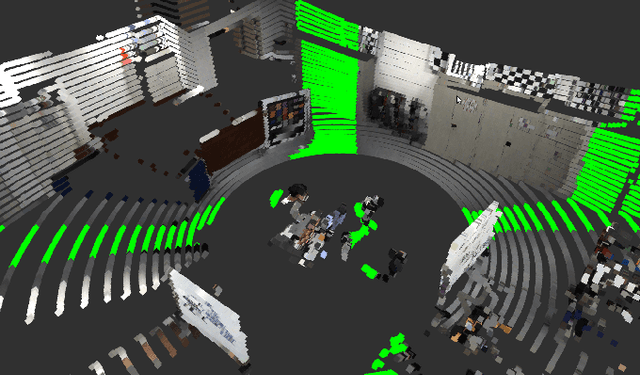
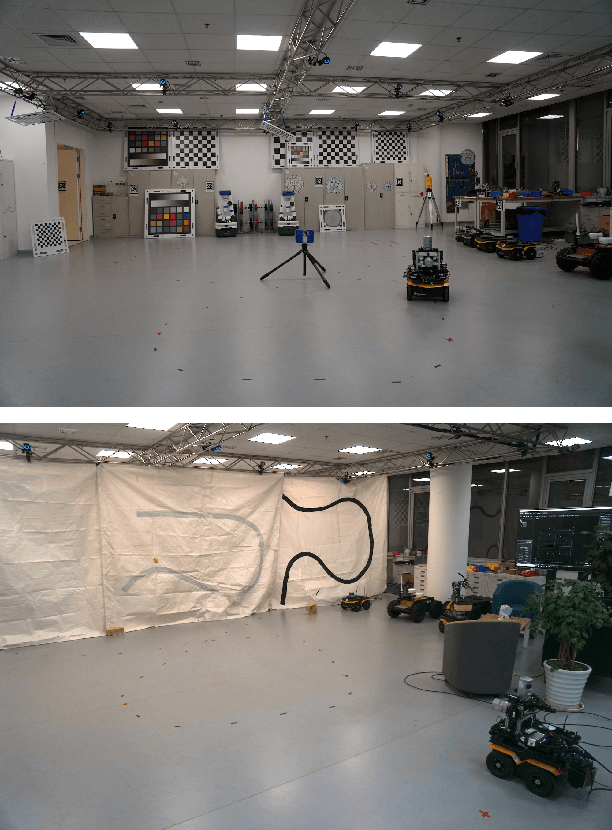
This paper presents a fully hardware synchronized mapping robot with support for a hardware synchronized external tracking system, for super-precise timing and localization. We also employ a professional, static 3D scanner for ground truth map collection. Three datasets are generated to evaluate the performance of mapping algorithms within a room and between rooms. Based on these datasets we generate maps and trajectory data, which is then fed into evaluation algorithms. The mapping and evaluation procedures are made in a very easily reproducible manner for maximum comparability. In the end we can draw a couple of conclusions about the tested SLAM algorithms.