 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAppearance-Preserving Refinement of Generated 3D Assets for Monochromatic Fabrication
Jun 25, 2026Recent advances in 3D mesh generation have enabled the creation of visually realistic assets. However, much of their visual fidelity is encoded in textures rather than geometry. When such assets are fabricated using monochromatic materials, texture information is largely lost, causing visually important details to disappear even when the original geometry is faithfully preserved. A key challenge is that the geometric perturbations required to recover texture-dependent appearance cues often introduce sharp local features and high-frequency surface structures, which may increase stress concentration and fabrication risk. In this paper, we present GenMF, an appearance-oriented geometry refinement framework for monochromatic fabrication. GenMF transforms texture-dependent visual cues into geometry-induced shading effects and formulates geometry refinement as a balance between appearance preservation and fabrication-oriented robustness. To discourage structurally and narrow the gap between simulation and physical manufacturing, we further introduce a differentiable stress-aware regularization based on a learned thermal-stress predictor. Experimental results demonstrate that GenMF significantly improves appearance preservation under monochromatic rendering while reducing stress concentration under a consistent thermo-mechanical simulation setting. Physical 3D printing examples further show that the refined geometries preserve more recognizable visual details while remaining suitable for fabrication. These results suggest that appearance-aware geometry refinement provides an effective bridge between generated 3D assets and fabrication-ready monochromatic objects.
Recovering 3D Shapes from Ultra-Fast Motion-Blurred Images
Feb 08, 2026We consider the problem of 3D shape recovery from ultra-fast motion-blurred images. While 3D reconstruction from static images has been extensively studied, recovering geometry from extreme motion-blurred images remains challenging. Such scenarios frequently occur in both natural and industrial settings, such as fast-moving objects in sports (e.g., balls) or rotating machinery, where rapid motion distorts object appearance and makes traditional 3D reconstruction techniques like Multi-View Stereo (MVS) ineffective. In this paper, we propose a novel inverse rendering approach for shape recovery from ultra-fast motion-blurred images. While conventional rendering techniques typically synthesize blur by averaging across multiple frames, we identify a major computational bottleneck in the repeated computation of barycentric weights. To address this, we propose a fast barycentric coordinate solver, which significantly reduces computational overhead and achieves a speedup of up to 4.57x, enabling efficient and photorealistic simulation of high-speed motion. Crucially, our method is fully differentiable, allowing gradients to propagate from rendered images to the underlying 3D shape, thereby facilitating shape recovery through inverse rendering. We validate our approach on two representative motion types: rapid translation and rotation. Experimental results demonstrate that our method enables efficient and realistic modeling of ultra-fast moving objects in the forward simulation. Moreover, it successfully recovers 3D shapes from 2D imagery of objects undergoing extreme translational and rotational motion, advancing the boundaries of vision-based 3D reconstruction. Project page: https://maxmilite.github.io/rec-from-ultrafast-blur/
From Orbit to Ground: Generative City Photogrammetry from Extreme Off-Nadir Satellite Images
Dec 09, 2025City-scale 3D reconstruction from satellite imagery presents the challenge of extreme viewpoint extrapolation, where our goal is to synthesize ground-level novel views from sparse orbital images with minimal parallax. This requires inferring nearly $90^\circ$ viewpoint gaps from image sources with severely foreshortened facades and flawed textures, causing state-of-the-art reconstruction engines such as NeRF and 3DGS to fail. To address this problem, we propose two design choices tailored for city structures and satellite inputs. First, we model city geometry as a 2.5D height map, implemented as a Z-monotonic signed distance field (SDF) that matches urban building layouts from top-down viewpoints. This stabilizes geometry optimization under sparse, off-nadir satellite views and yields a watertight mesh with crisp roofs and clean, vertically extruded facades. Second, we paint the mesh appearance from satellite images via differentiable rendering techniques. While the satellite inputs may contain long-range, blurry captures, we further train a generative texture restoration network to enhance the appearance, recovering high-frequency, plausible texture details from degraded inputs. Our method's scalability and robustness are demonstrated through extensive experiments on large-scale urban reconstruction. For example, in our teaser figure, we reconstruct a $4\,\mathrm{km}^2$ real-world region from only a few satellite images, achieving state-of-the-art performance in synthesizing photorealistic ground views. The resulting models are not only visually compelling but also serve as high-fidelity, application-ready assets for downstream tasks like urban planning and simulation. Project page can be found at https://pku-vcl-geometry.github.io/Orbit2Ground/.
Fabrication-Aware Reverse Engineering for Carpentry
Jul 21, 2021
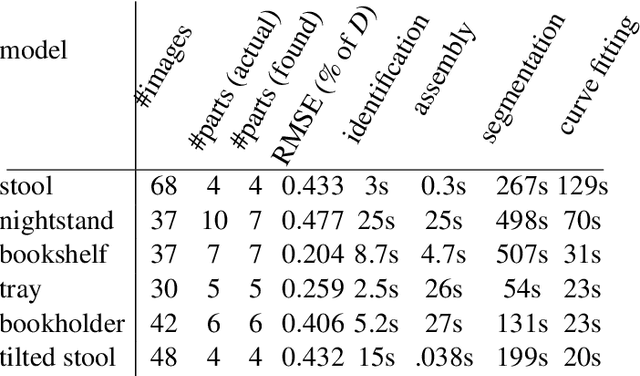
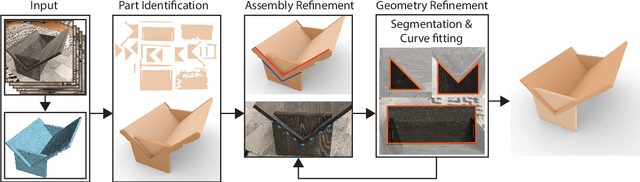
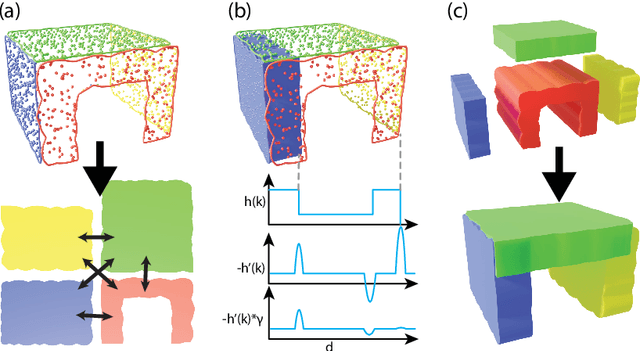
We propose a novel method to generate fabrication blueprints from images of carpentered items. While 3D reconstruction from images is a well-studied problem, typical approaches produce representations that are ill-suited for computer-aided design and fabrication applications. Our key insight is that fabrication processes define and constrain the design space for carpentered objects, and can be leveraged to develop novel reconstruction methods. Our method makes use of domain-specific constraints to recover not just valid geometry, but a semantically valid assembly of parts, using a combination of image-based and geometric optimization techniques. We demonstrate our method on a variety of wooden objects and furniture, and show that we can automatically obtain designs that are both easy to edit and accurate recreations of the ground truth. We further illustrate how our method can be used to fabricate a physical replica of the captured object as well as a customized version, which can be produced by directly editing the reconstructed model in CAD software.