 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollision-Aware Vision-Language Learning for End-to-End Driving with Multimodal Infraction Datasets
Mar 26, 2026High infraction rates remain the primary bottleneck for end-to-end (E2E) autonomous driving, as evidenced by the low driving scores on the CARLA Leaderboard. Despite collision-related infractions being the dominant failure mode in closed-loop evaluations, collision-aware representation learning has received limited attention. To address this gap, we first develop a Video-Language-Augmented Anomaly Detector (VLAAD), leveraging a Multiple Instance Learning (MIL) formulation to obtain stable, temporally localized collision signals for proactive prediction. To transition these capabilities into closed-loop simulations, we must overcome the limitations of existing simulator datasets, which lack multimodality and are frequently restricted to simple intersection scenarios. Therefore, we introduce CARLA-Collide, a large-scale multimodal dataset capturing realistic collision events across highly diverse road networks. Trained on this diverse simulator data, VLAAD serves as a collision-aware plug-in module that can be seamlessly integrated into existing E2E driving models. By integrating our module into a pretrained TransFuser++ agent, we demonstrate a 14.12% relative increase in driving score with minimal fine-tuning. Beyond closed-loop evaluation, we further assess the generalization capability of VLAAD in an open-loop setting using real-world driving data. To support this analysis, we introduce Real-Collide, a multimodal dataset of diverse dashcam videos paired with semantically rich annotations for collision detection and prediction. On this benchmark, despite containing only 0.6B parameters, VLAAD outperforms a multi-billion-parameter vision-language model, achieving a 23.3% improvement in AUC.
Adversarial-Robust Multivariate Time-Series Anomaly Detection via Joint Information Retention
Mar 26, 2026Time-series anomaly detection (TSAD) is a critical component in monitoring complex systems, yet modern deep learning-based detectors are often highly sensitive to localized input corruptions and structured noise. We propose ARTA (Adversarially Robust multivariate Time-series Anomaly detection via joint information retention), a joint training framework that improves detector robustness through a principled min-max optimization objective. ARTA comprises an anomaly detector and a sparsity-constrained mask generator that are trained simultaneously. The generator identifies minimal, task-relevant temporal perturbations that maximally increase the detector's anomaly score, while the detector is optimized to remain stable under these structured perturbations. The resulting masks characterize the detector's sensitivity to adversarial temporal corruptions and can serve as explanatory signals for the detector's decisions. This adversarial training strategy exposes brittle decision pathways and encourages the detector to rely on distributed and stable temporal patterns rather than spurious localized artifacts. We conduct extensive experiments on the TSB-AD benchmark, demonstrating that ARTA consistently improves anomaly detection performance across diverse datasets and exhibits significantly more graceful degradation under increasing noise levels compared to state-of-the-art baselines.
EngineAD: A Real-World Vehicle Engine Anomaly Detection Dataset
Mar 26, 2026The progress of Anomaly Detection (AD) in safety-critical domains, such as transportation, is severely constrained by the lack of large-scale, real-world benchmarks. To address this, we introduce EngineAD, a novel, multivariate dataset comprising high-resolution sensor telemetry collected from a fleet of 25 commercial vehicles over a six-month period. Unlike synthetic datasets, EngineAD features authentic operational data labeled with expert annotations, distinguishing normal states from subtle indicators of incipient engine faults. We preprocess the data into $300$-timestep segments of $8$ principal components and establish an initial benchmark using nine diverse one-class anomaly detection models. Our experiments reveal significant performance variability across the vehicle fleet, underscoring the challenge of cross-vehicle generalization. Furthermore, our findings corroborate recent literature, showing that simple classical methods (e.g., K-Means and One-Class SVM) are often highly competitive with, or superior to, deep learning approaches in this segment-based evaluation. By publicly releasing EngineAD, we aim to provide a realistic, challenging resource for developing robust and field-deployable anomaly detection and anomaly prediction solutions for the automotive industry.
Unveiling the Flaws: A Critical Analysis of Initialization Effect on Time Series Anomaly Detection
Aug 13, 2024



Deep learning for time-series anomaly detection (TSAD) has gained significant attention over the past decade. Despite the reported improvements in several papers, the practical application of these models remains limited. Recent studies have cast doubt on these models, attributing their results to flawed evaluation techniques. However, the impact of initialization has largely been overlooked. This paper provides a critical analysis of the initialization effects on TSAD model performance. Our extensive experiments reveal that TSAD models are highly sensitive to hyperparameters such as window size, seed number, and normalization. This sensitivity often leads to significant variability in performance, which can be exploited to artificially inflate the reported efficacy of these models. We demonstrate that even minor changes in initialization parameters can result in performance variations that overshadow the claimed improvements from novel model architectures. Our findings highlight the need for rigorous evaluation protocols and transparent reporting of preprocessing steps to ensure the reliability and fairness of anomaly detection methods. This paper calls for a more cautious interpretation of TSAD advancements and encourages the development of more robust and transparent evaluation practices to advance the field and its practical applications.
C3: Cross-instance guided Contrastive Clustering
Nov 21, 2022Clustering is the task of gathering similar data samples into clusters without using any predefined labels. It has been widely studied in machine learning literature, and recent advancements in deep learning have revived interest in this field. Contrastive clustering (CC) models are a staple of deep clustering in which positive and negative pairs of each data instance are generated through data augmentation. CC models aim to learn a feature space where instance-level and cluster-level representations of positive pairs are grouped together. Despite improving the SOTA, these algorithms ignore the cross-instance patterns, which carry essential information for improving clustering performance. In this paper, we propose a novel contrastive clustering method, Cross-instance guided Contrastive Clustering (C3), that considers the cross-sample relationships to increase the number of positive pairs. In particular, we define a new loss function that identifies similar instances using the instance-level representation and encourages them to aggregate together. Extensive experimental evaluations show that our proposed method can outperform state-of-the-art algorithms on benchmark computer vision datasets: we improve the clustering accuracy by 6.8%, 2.8%, 4.9%, 1.3% and 0.4% on CIFAR-10, CIFAR-100, ImageNet-10, ImageNet-Dogs, and Tiny-ImageNet, respectively.
Self-Supervised Anomaly Detection: A Survey and Outlook
May 12, 2022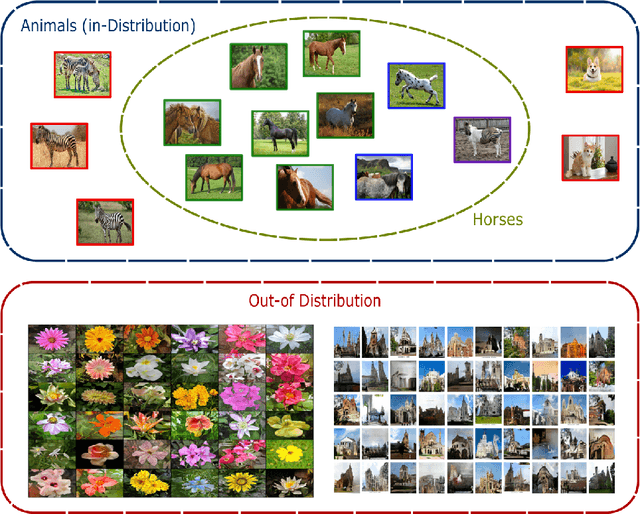
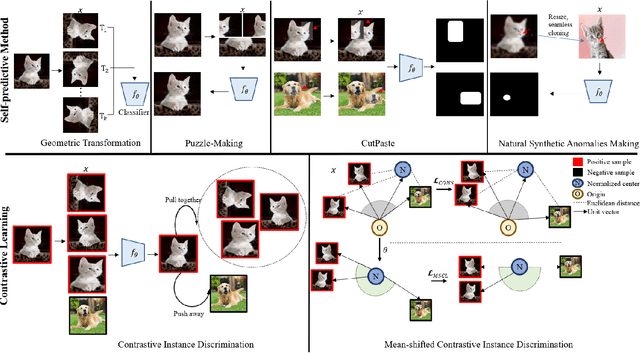
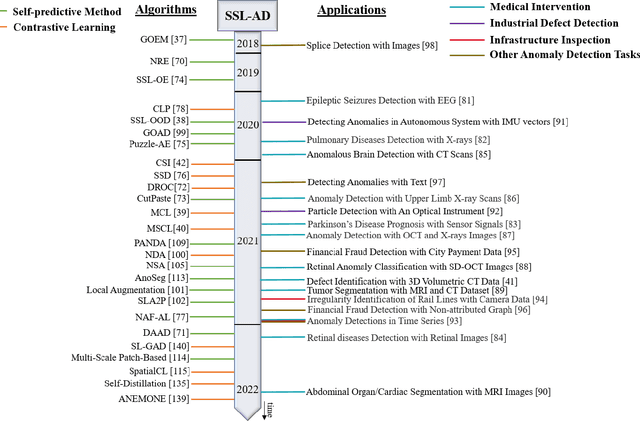
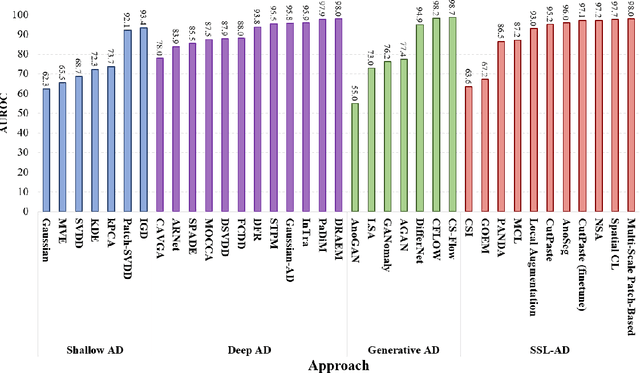
Over the past few years, anomaly detection, a subfield of machine learning that is mainly concerned with the detection of rare events, witnessed an immense improvement following the unprecedented growth of deep learning models. Recently, the emergence of self-supervised learning has sparked the development of new anomaly detection algorithms that surpassed state-of-the-art accuracy by a significant margin. This paper aims to review the current approaches in self-supervised anomaly detection. We present technical details of the common approaches and discuss their strengths and drawbacks. We also compare the performance of these models against each other and other state-of-the-art anomaly detection models. Finally, we discuss a variety of new directions for improving the existing algorithms.
DASVDD: Deep Autoencoding Support Vector Data Descriptor for Anomaly Detection
Jun 09, 2021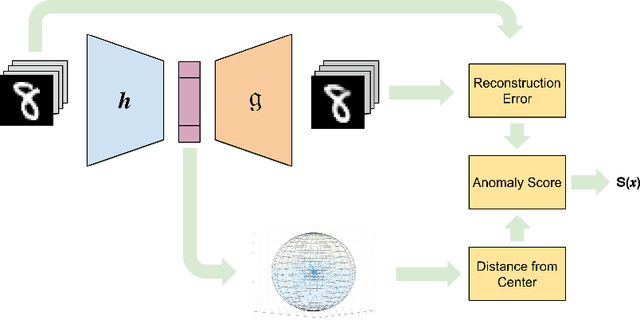
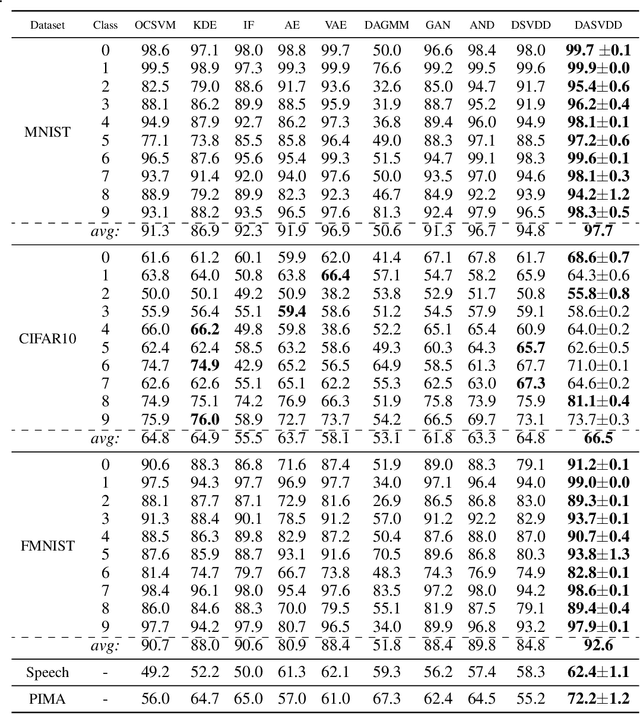

Semi-supervised anomaly detection, which aims to detect anomalies from normal samples using a model that is solely trained on normal data, has been an active field of research in the past decade. With recent advancements in deep learning, particularly generative adversarial networks and autoencoders, researchers have designed efficient deep anomaly detection methods. Existing works commonly use neural networks such as an autoencoder to map the data into a new representation that is easier to work with and then apply an anomaly detection algorithm. In this paper, we propose a method, DASVDD, that jointly learns the parameters of an autoencoder while minimizing the volume of an enclosing hyper-sphere on its latent representation. We propose a customized anomaly score which is a combination of autoencoder's reconstruction error and distance of the lower-dimensional representation of a sample from the center of the enclosing hyper-sphere. Minimizing this anomaly score on the normal data during training aids us in learning the underlying distribution of normal data. Including the reconstruction error in the anomaly score ensures that DASVDD does not suffer from the common hyper-sphere collapse issue since the proposed DASVDD model does not converge to the trivial solution of mapping all inputs to a constant point in the latent representation. Experimental evaluations on several benchmark datasets from different domains show that the proposed method outperforms most of the commonly used state-of-the-art anomaly detection algorithms while maintaining robust and accurate performance across different anomaly classes.