 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimation of Closest In-Path Vehicle by Low-Channel LiDAR and Camera Sensor Fusion for Autonomous Vehicle
Mar 25, 2021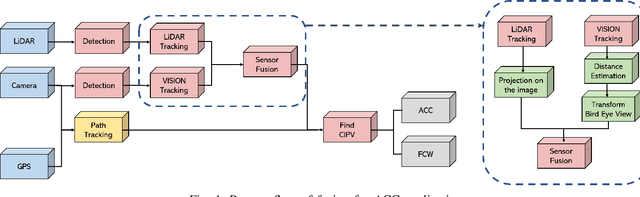
In autonomous driving, using a variety of sensors to recognize preceding vehicles in middle and long distance is helpful for improving driving performance and developing various functions. However, if only LiDAR or camera is used in the recognition stage, it is difficult to obtain necessary data due to the limitations of each sensor. In this paper, we proposed a method of converting the tracking data of vision into bird's eye view (BEV) coordinates using an equation that projects LiDAR points onto an image, and a method of fusion between LiDAR and vision tracked data. Thus, the newly proposed method was effective through the results of detecting closest in-path vehicle (CIPV) in various situations. In addition, even when experimenting with the EuroNCAP autonomous emergency braking (AEB) test protocol using the result of fusion, AEB performance is improved through improved cognitive performance than when using only LiDAR. In experimental results, the performance of the proposed method was proved through actual vehicle tests in various scenarios. Consequently, it is convincing that the newly proposed sensor fusion method significantly improves the ACC function in autonomous maneuvering. We expect that this improvement in perception performance will contribute to improving the overall stability of ACC.