 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCADFS: A Big CAD Program Dataset and Framework for Computer-Aided Design with Large Language Models
May 03, 2026We introduce CADFS, a data-centric framework that enables large vision-language models to generate complex CAD design histories. Existing generative CAD systems are restricted to sketch-extrude operations due to simplified representations and limited datasets. We address this by introducing a FeatureScript-based representation and constructing a dataset of 450k real-world CAD models spanning 15 modeling operations. We obtain the dataset via a new pipeline that reconstructs clean, executable FeatureScript programs and provides multimodal annotations. Fine-tuning a VLM on this representation yields state-of-the-art results in text-conditioned CAD generation and image-based reconstruction, producing more accurate, diverse, and feature-rich designs than prior frameworks. Ablations show that each individual component of our framework, i.e., the FeatureScript representation, the extended operation set, and representation-aligned textual descriptions, significantly improves performance. Our framework substantially broadens the complexity and realism achievable in generative CAD. The CADFS framework and the new dataset are available at https://voyleg.github.io/cadfs/.
Multi-sensor large-scale dataset for multi-view 3D reconstruction
Mar 11, 2022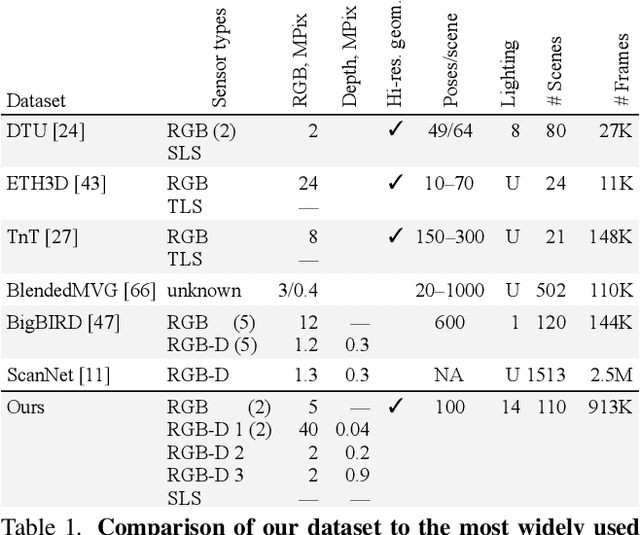
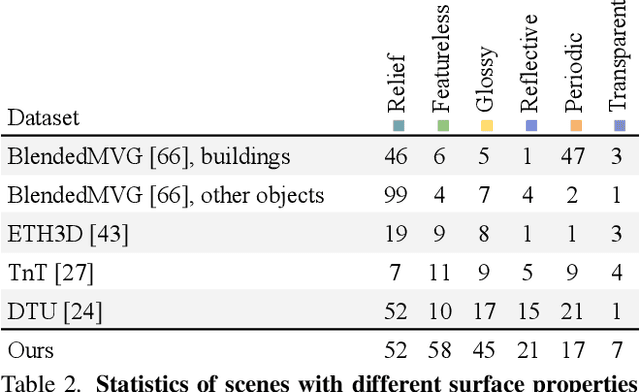
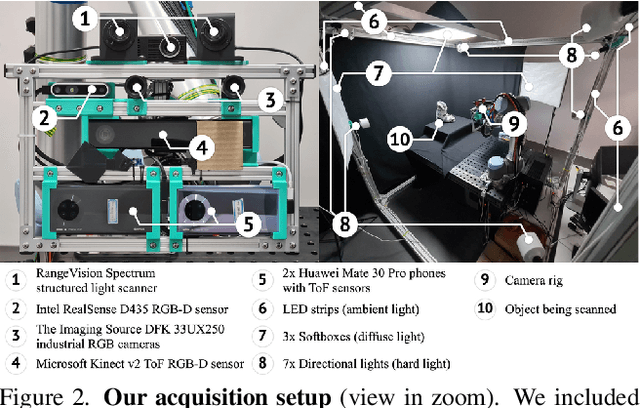
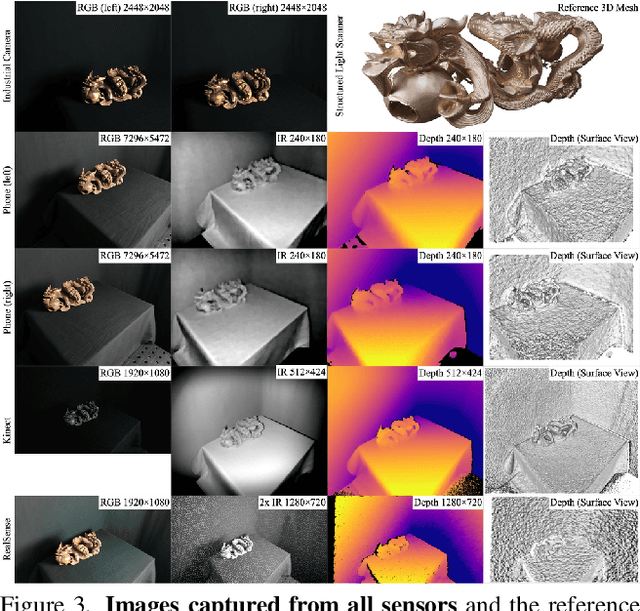
We present a new multi-sensor dataset for 3D surface reconstruction. It includes registered RGB and depth data from sensors of different resolutions and modalities: smartphones, Intel RealSense, Microsoft Kinect, industrial cameras, and structured-light scanner. The data for each scene is obtained under a large number of lighting conditions, and the scenes are selected to emphasize a diverse set of material properties challenging for existing algorithms. In the acquisition process, we aimed to maximize high-resolution depth data quality for challenging cases, to provide reliable ground truth for learning algorithms. Overall, we provide over 1.4 million images of 110 different scenes acquired at 14 lighting conditions from 100 viewing directions. We expect our dataset will be useful for evaluation and training of 3D reconstruction algorithms of different types and for other related tasks. Our dataset and accompanying software will be available online.
DEF: Deep Estimation of Sharp Geometric Features in 3D Shapes
Nov 30, 2020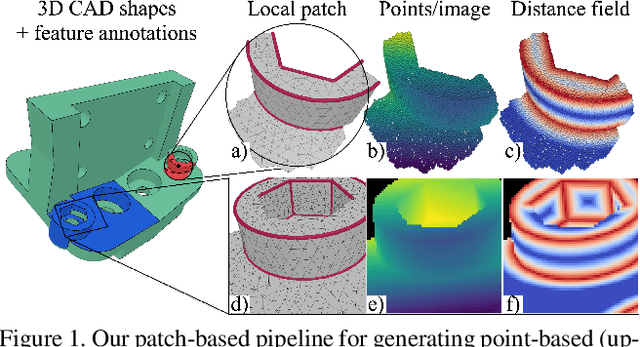
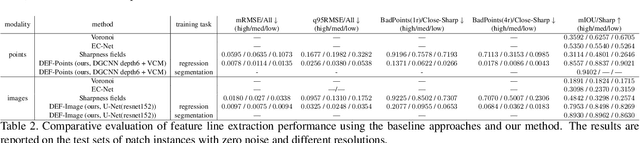
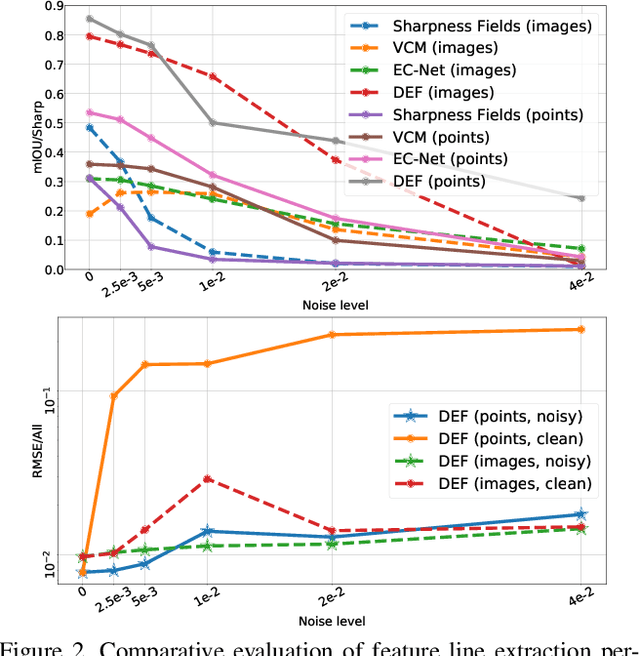
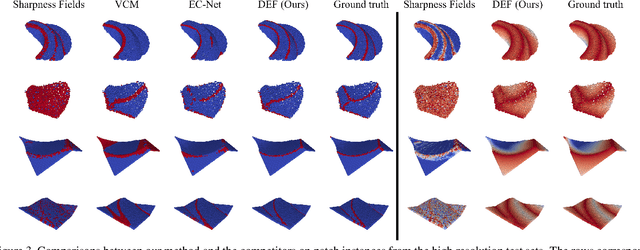
Sharp feature lines carry essential information about human-made objects, enabling compact 3D shape representations, high-quality surface reconstruction, and are a signal source for mesh processing. While extracting high-quality lines from noisy and undersampled data is challenging for traditional methods, deep learning-powered algorithms can leverage global and semantic information from the training data to aid in the process. We propose Deep Estimators of Features (DEFs), a learning-based framework for predicting sharp geometric features in sampled 3D shapes. Differently from existing data-driven methods, which reduce this problem to feature classification, we propose to regress a scalar field representing the distance from point samples to the closest feature line on local patches. By fusing the result of individual patches, we can process large 3D models, which are impossible to process for existing data-driven methods due to their size and complexity. Extensive experimental evaluation of DEFs is implemented on synthetic and real-world 3D shape datasets and suggests advantages of our image- and point-based estimators over competitor methods, as well as improved noise robustness and scalability of our approach.