 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Planning and Control with a Vortex Particle Model for Fixed-Wing UAVs in Unsteady Flows
Sep 19, 2025Unsteady aerodynamic effects can have a profound impact on aerial vehicle flight performance, especially during agile maneuvers and in complex aerodynamic environments. In this paper, we present a real-time planning and control approach capable of reasoning about unsteady aerodynamics. Our approach relies on a lightweight vortex particle model, parallelized to allow GPU acceleration, and a sampling-based policy optimization strategy capable of leveraging the vortex particle model for predictive reasoning. We demonstrate, through both simulation and hardware experiments, that by replanning with our unsteady aerodynamics model, we can improve the performance of aggressive post-stall maneuvers in the presence of unsteady environmental flow disturbances.
Planning and Control for a Dynamic Morphing-Wing UAV Using a Vortex Particle Model
Jul 05, 2023



Achieving precise, highly-dynamic maneuvers with Unmanned Aerial Vehicles (UAVs) is a major challenge due to the complexity of the associated aerodynamics. In particular, unsteady effects -- as might be experienced in post-stall regimes or during sudden vehicle morphing -- can have an adverse impact on the performance of modern flight control systems. In this paper, we present a vortex particle model and associated model-based controller capable of reasoning about the unsteady aerodynamics during aggressive maneuvers. We evaluate our approach in hardware on a morphing-wing UAV executing post-stall perching maneuvers. Our results show that the use of the unsteady aerodynamics model improves performance during both fixed-wing and dynamic-wing perching, while the use of wing-morphing planned with quasi-steady aerodynamics results in reduced performance. While the focus of this paper is a pre-computed control policy, we believe that, with sufficient computational resources, our approach could enable online planning in the future.
Continual Reinforcement Learning with TELLA
Aug 08, 2022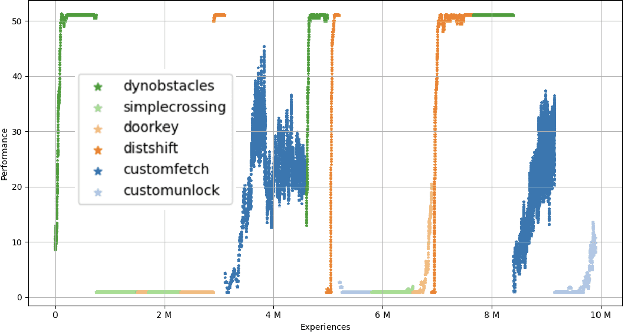
Training reinforcement learning agents that continually learn across multiple environments is a challenging problem. This is made more difficult by a lack of reproducible experiments and standard metrics for comparing different continual learning approaches. To address this, we present TELLA, a tool for the Test and Evaluation of Lifelong Learning Agents. TELLA provides specified, reproducible curricula to lifelong learning agents while logging detailed data for evaluation and standardized analysis. Researchers can define and share their own curricula over various learning environments or run against a curriculum created under the DARPA Lifelong Learning Machines (L2M) Program.