 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBackward-Compatible Prediction Updates: A Probabilistic Approach
Jul 02, 2021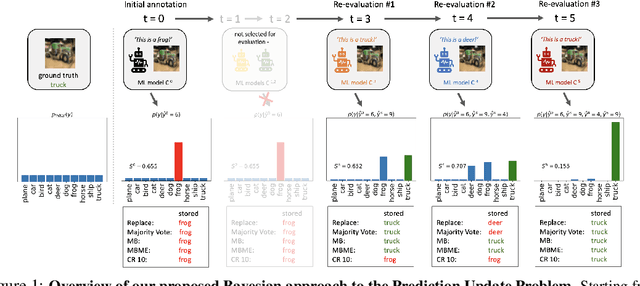
When machine learning systems meet real world applications, accuracy is only one of several requirements. In this paper, we assay a complementary perspective originating from the increasing availability of pre-trained and regularly improving state-of-the-art models. While new improved models develop at a fast pace, downstream tasks vary more slowly or stay constant. Assume that we have a large unlabelled data set for which we want to maintain accurate predictions. Whenever a new and presumably better ML models becomes available, we encounter two problems: (i) given a limited budget, which data points should be re-evaluated using the new model?; and (ii) if the new predictions differ from the current ones, should we update? Problem (i) is about compute cost, which matters for very large data sets and models. Problem (ii) is about maintaining consistency of the predictions, which can be highly relevant for downstream applications; our demand is to avoid negative flips, i.e., changing correct to incorrect predictions. In this paper, we formalize the Prediction Update Problem and present an efficient probabilistic approach as answer to the above questions. In extensive experiments on standard classification benchmark data sets, we show that our method outperforms alternative strategies along key metrics for backward-compatible prediction updates.
On the Transfer of Disentangled Representations in Realistic Settings
Oct 27, 2020


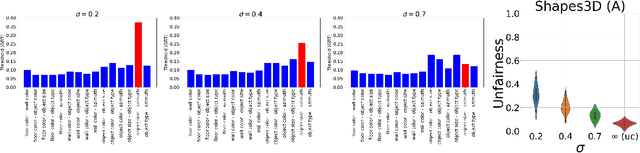
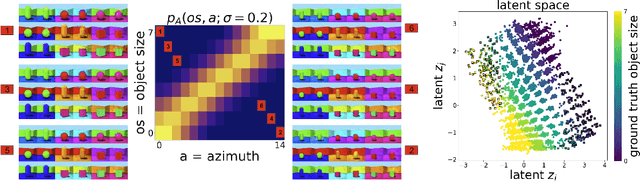
Learning meaningful representations that disentangle the underlying structure of the data generating process is considered to be of key importance in machine learning. While disentangled representations were found to be useful for diverse tasks such as abstract reasoning and fair classification, their scalability and real-world impact remain questionable. We introduce a new high-resolution dataset with 1M simulated images and over 1,800 annotated real-world images of the same robotic setup. In contrast to previous work, this new dataset exhibits correlations, a complex underlying structure, and allows to evaluate transfer to unseen simulated and real-world settings where the encoder i) remains in distribution or ii) is out of distribution. We propose new architectures in order to scale disentangled representation learning to realistic high-resolution settings and conduct a large-scale empirical study of disentangled representations on this dataset. We observe that disentanglement is a good predictor for out-of-distribution (OOD) task performance.
CausalWorld: A Robotic Manipulation Benchmark for Causal Structure and Transfer Learning
Oct 08, 2020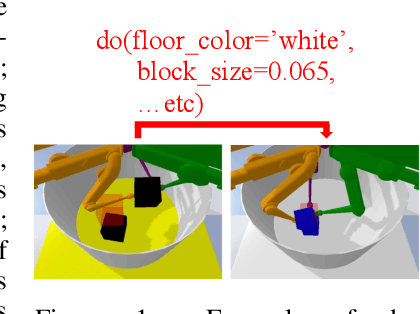
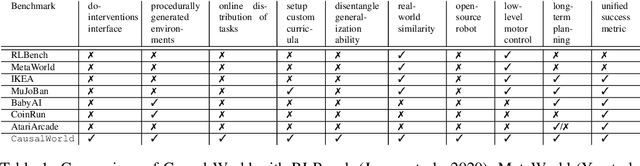
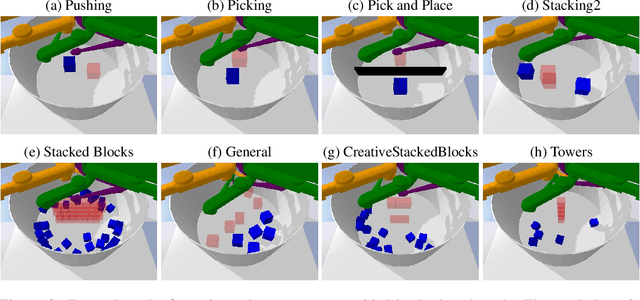
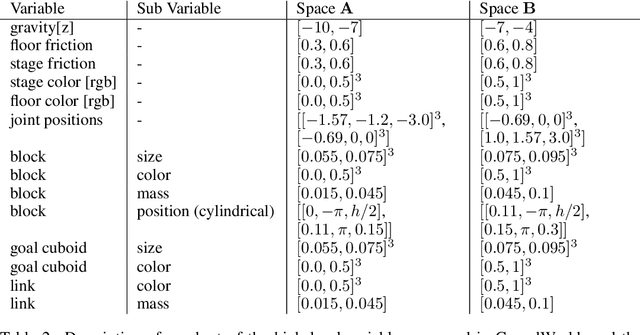
Despite recent successes of reinforcement learning (RL), it remains a challenge for agents to transfer learned skills to related environments. To facilitate research addressing this problem, we propose CausalWorld, a benchmark for causal structure and transfer learning in a robotic manipulation environment. The environment is a simulation of an open-source robotic platform, hence offering the possibility of sim-to-real transfer. Tasks consist of constructing 3D shapes from a given set of blocks - inspired by how children learn to build complex structures. The key strength of CausalWorld is that it provides a combinatorial family of such tasks with common causal structure and underlying factors (including, e.g., robot and object masses, colors, sizes). The user (or the agent) may intervene on all causal variables, which allows for fine-grained control over how similar different tasks (or task distributions) are. One can thus easily define training and evaluation distributions of a desired difficulty level, targeting a specific form of generalization (e.g., only changes in appearance or object mass). Further, this common parametrization facilitates defining curricula by interpolating between an initial and a target task. While users may define their own task distributions, we present eight meaningful distributions as concrete benchmarks, ranging from simple to very challenging, all of which require long-horizon planning as well as precise low-level motor control. Finally, we provide baseline results for a subset of these tasks on distinct training curricula and corresponding evaluation protocols, verifying the feasibility of the tasks in this benchmark.
Is Independence all you need? On the Generalization of Representations Learned from Correlated Data
Jun 14, 2020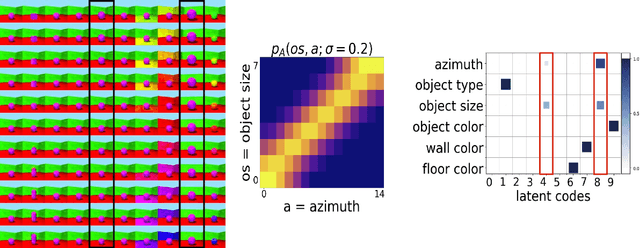
Despite impressive progress in the last decade, it still remains an open challenge to build models that generalize well across multiple tasks and datasets. One path to achieve this is to learn meaningful and compact representations, in which different semantic aspects of data are structurally disentangled. The focus of disentanglement approaches has been on separating independent factors of variation despite the fact that real-world observations are often not structured into meaningful independent causal variables to begin with. In this work we bridge the gap to real-world scenarios by analyzing the behavior of most prominent methods and disentanglement scores on correlated data in a large scale empirical study (including 3900 models). We show that systematically induced correlations in the dataset are being learned and reflected in the latent representations, while widely used disentanglement scores fall short of capturing these latent correlations. Finally, we demonstrate how to disentangle these latent correlations using weak supervision, even if we constrain this supervision to be causally plausible. Our results thus support the argument to learn independent mechanisms rather than independent factors of variations.