 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGradient Distance Function
Oct 29, 2024



Unsigned Distance Functions (UDFs) can be used to represent non-watertight surfaces in a deep learning framework. However, UDFs tend to be brittle and difficult to learn, in part because the surface is located exactly where the UDF is non-differentiable. In this work, we show that Gradient Distance Functions (GDFs) can remedy this by being differentiable at the surface while still being able to represent open surfaces. This is done by associating to each 3D point a 3D vector whose norm is taken to be the unsigned distance to the surface and whose orientation is taken to be the direction towards the closest surface point. We demonstrate the effectiveness of GDFs on ShapeNet Car, Multi-Garment, and 3D-Scene datasets with both single-shape reconstruction networks or categorical auto-decoders.
Neural Surface Detection for Unsigned Distance Fields
Jul 25, 2024



Extracting surfaces from Signed Distance Fields (SDFs) can be accomplished using traditional algorithms, such as Marching Cubes. However, since they rely on sign flips across the surface, these algorithms cannot be used directly on Unsigned Distance Fields (UDFs). In this work, we introduce a deep-learning approach to taking a UDF and turning it locally into an SDF, so that it can be effectively triangulated using existing algorithms. We show that it achieves better accuracy in surface detection than existing methods. Furthermore it generalizes well to unseen shapes and datasets, while being parallelizable. We also demonstrate the flexibily of the method by using it in conjunction with DualMeshUDF, a state of the art dual meshing method that can operate on UDFs, improving its results and removing the need to tune its parameters.
MeshUDF: Fast and Differentiable Meshing of Unsigned Distance Field Networks
Nov 29, 2021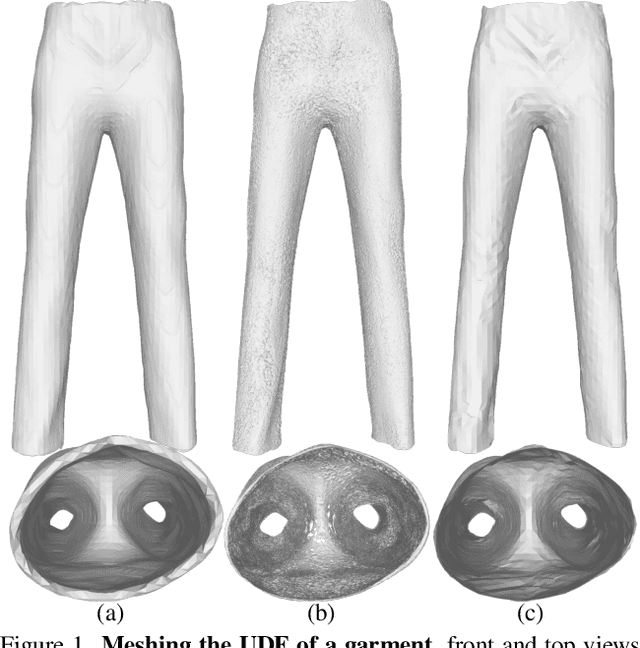
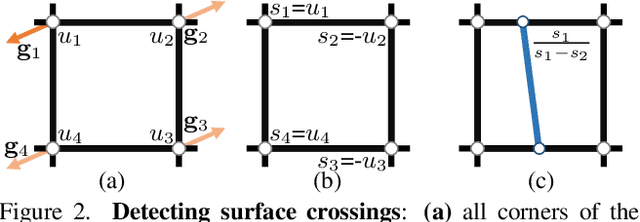
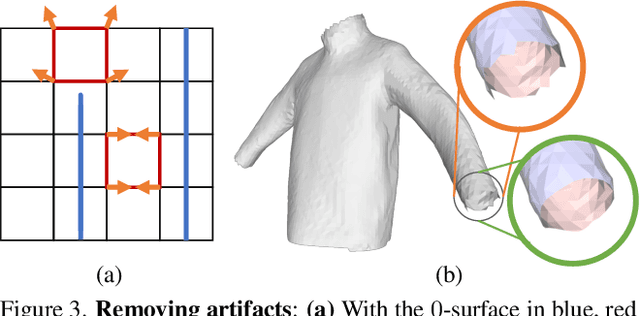
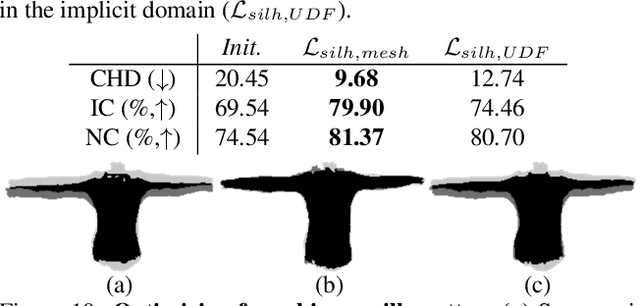
Recent work modelling 3D open surfaces train deep neural networks to approximate Unsigned Distance Fields (UDFs) and implicitly represent shapes. To convert this representation to an explicit mesh, they either use computationally expensive methods to mesh a dense point cloud sampling of the surface, or distort the surface by inflating it into a Signed Distance Field (SDF). By contrast, we propose to directly mesh deep UDFs as open surfaces with an extension of marching cubes, by locally detecting surface crossings. Our method is order of magnitude faster than meshing a dense point cloud, and more accurate than inflating open surfaces. Moreover, we make our surface extraction differentiable, and show it can help fit sparse supervision signals.
Learning to Orient Surfaces by Self-supervised Spherical CNNs
Nov 13, 2020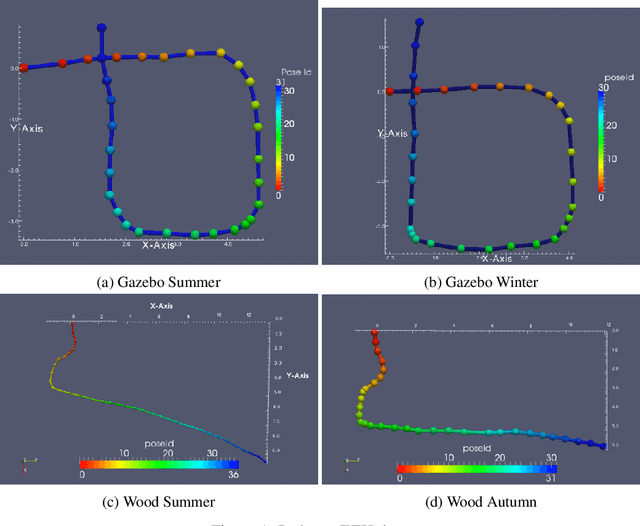
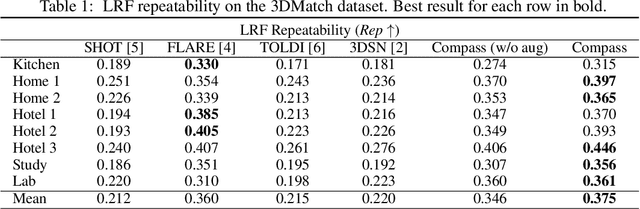
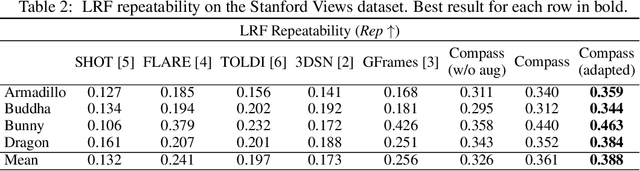
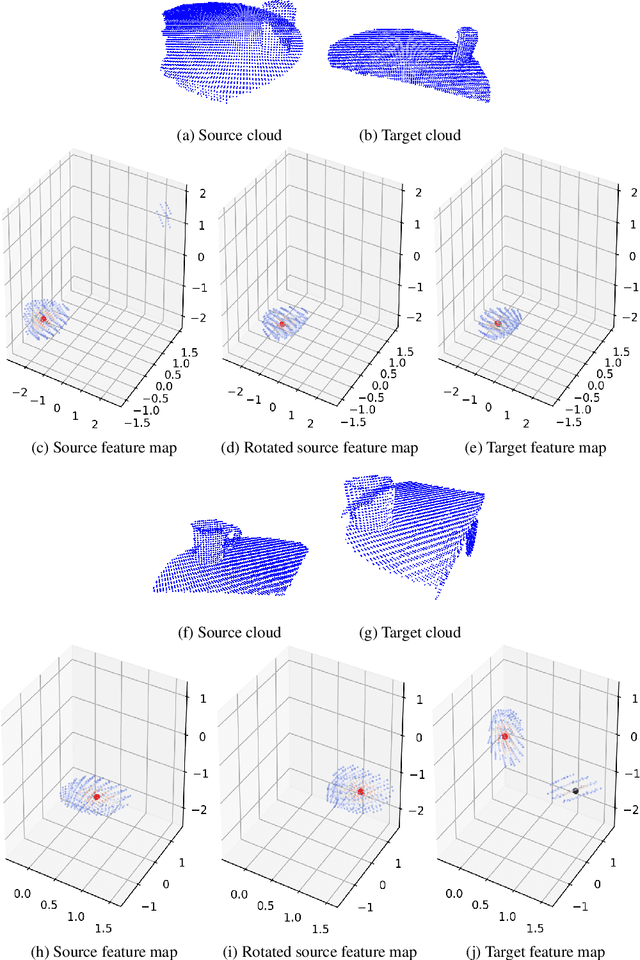
Defining and reliably finding a canonical orientation for 3D surfaces is key to many Computer Vision and Robotics applications. This task is commonly addressed by handcrafted algorithms exploiting geometric cues deemed as distinctive and robust by the designer. Yet, one might conjecture that humans learn the notion of the inherent orientation of 3D objects from experience and that machines may do so alike. In this work, we show the feasibility of learning a robust canonical orientation for surfaces represented as point clouds. Based on the observation that the quintessential property of a canonical orientation is equivariance to 3D rotations, we propose to employ Spherical CNNs, a recently introduced machinery that can learn equivariant representations defined on the Special Orthogonal group SO(3). Specifically, spherical correlations compute feature maps whose elements define 3D rotations. Our method learns such feature maps from raw data by a self-supervised training procedure and robustly selects a rotation to transform the input point cloud into a learned canonical orientation. Thereby, we realize the first end-to-end learning approach to define and extract the canonical orientation of 3D shapes, which we aptly dub Compass. Experiments on several public datasets prove its effectiveness at orienting local surface patches as well as whole objects.