 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnergy Efficient Operation of Adaptive Massive MIMO 5G HetNets
Feb 20, 2023



For energy efficient operation of the massive multiple-input multiple-output (MIMO) networks, various aspects of energy efficiency maximization have been addressed, where a careful selection of number of active antennas has shown significant gains. Moreover, switching-off physical resource blocks (PRBs) and carrier shutdown saves energy in low load scenarios. However, the joint optimization of spectral PRB allocation and spatial layering in a heterogeneous network has not been completely solved yet. Therefore, we study a power consumption model for multi-cell multi-user massive MIMO 5G network, capturing the joint effects of both dimensions. We characterize the optimal resource allocation under practical constraints, i.e., limited number of available antennas, PRBs, base stations (BSs), and frequency bands. We observe a single spatial layer achieving lowest energy consumption in very low load scenarios, whereas, spatial layering is required in high load scenarios. Finally, we derive novel algorithms for energy efficient user to BS assignment and propose an adaptive algorithm for PRB assignment and power control. All results are illustrated by numerical system-level simulations, describing a realistic metropolis scenario. The results show that a higher frequency band should be used to support users with large rate requirements via spatial multiplexing and assigning each user maximum available PRBs.
Smart Resource Allocation Model via Artificial Intelligence in Software Defined 6G Networks
Feb 09, 2023



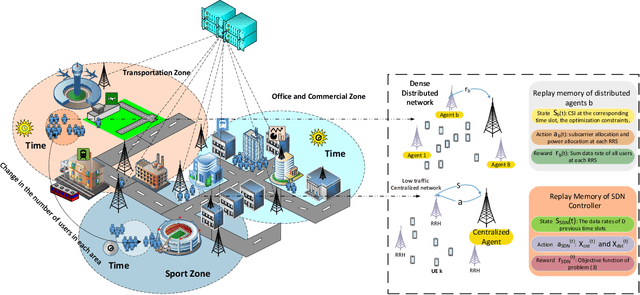
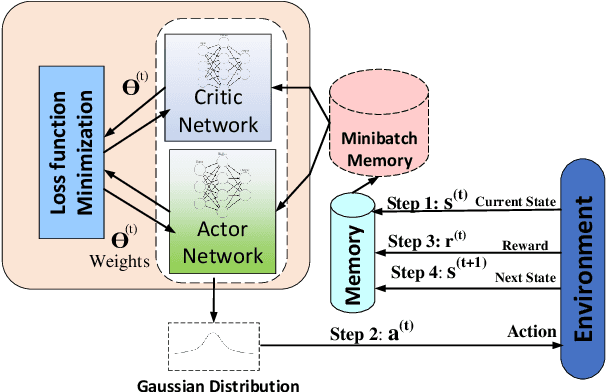
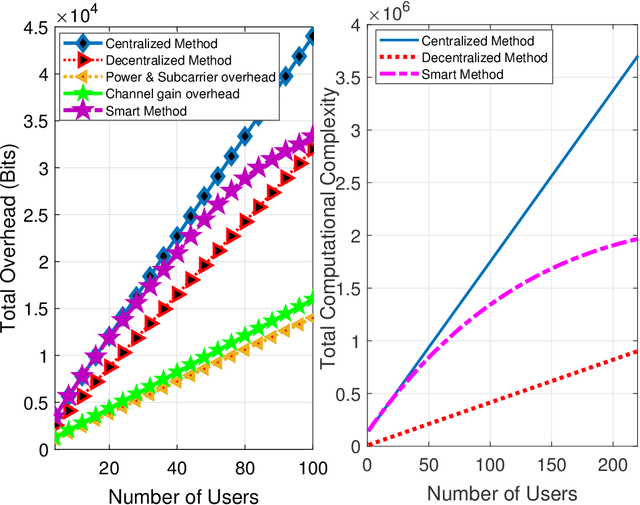
In this paper, we design a new flexible smart software-defined radio access network (Soft-RAN) architecture with traffic awareness for sixth generation (6G) wireless networks. In particular, we consider a hierarchical resource allocation model for the proposed smart soft-RAN model where the software-defined network (SDN) controller is the first and foremost layer of the framework. This unit dynamically monitors the network to select a network operation type on the basis of distributed or centralized resource allocation procedures to intelligently perform decision-making. In this paper, our aim is to make the network more scalable and more flexible in terms of conflicting performance indicators such as achievable data rate, overhead, and complexity indicators. To this end, we introduce a new metric, i.e., throughput-overhead-complexity (TOC), for the proposed machine learning-based algorithm, which supports a trade-off between these performance indicators. In particular, the decision making based on TOC is solved via deep reinforcement learning (DRL) which determines an appropriate resource allocation policy. Furthermore, for the selected algorithm, we employ the soft actor-critic (SAC) method which is more accurate, scalable, and robust than other learning methods. Simulation results demonstrate that the proposed smart network achieves better performance in terms of TOC compared to fixed centralized or distributed resource management schemes that lack dynamism. Moreover, our proposed algorithm outperforms conventional learning methods employed in recent state-of-the-art network designs.
RISNet: a Dedicated Scalable Neural Network Architecture for Optimization of Reconfigurable Intelligent Surfaces
Dec 06, 2022



The reconfigurable intelligent surface (RIS) is a promising technology for next-generation wireless communication. It comprises many passive antennas, which reflect signals from the transmitter to the receiver with adjusted phases without changing the amplitude. The large number of the antennas enables a huge potential of signal processing despite the simple functionality of a single antenna. However, it also makes the RIS configuration a high dimensional problem, which might not have a closed-form solution and has a high complexity and, as a result, severe difficulty in online real-time application if we apply iterative numerical solutions. In this paper, we introduce a machine learning approach to maximize the weighted sum-rate (WSR). We propose a dedicated neural network architecture called RISNet. The RIS optimization is designed according to the RIS property of product and direct channel and homogeneous RIS antennas. The architecture is scalable due to the fact that the number of trainable parameters is independent from the number of RIS antennas (because all antennas share the same parameters). The weighted minimum mean squared error (WMMSE) precoding is applied and an alternating optimization (AO) training procedure is designed. Testing results show that the proposed approach outperforms the state-of-the-art block coordinate descent (BCD) algorithm. Moreover, although the training takes several hours, online testing with trained model (application) is almost instant, which makes it feasible for real-time application. Compared to it, the BCD algorithm requires much more convergence time. Therefore, the proposed method outperforms the state-of-the-art algorithm in both performance and complexity.
Two-Hop Age of Information Scheduling for Multi-UAV Assisted Mobile Edge Computing: FRL vs MADDPG
Jun 19, 2022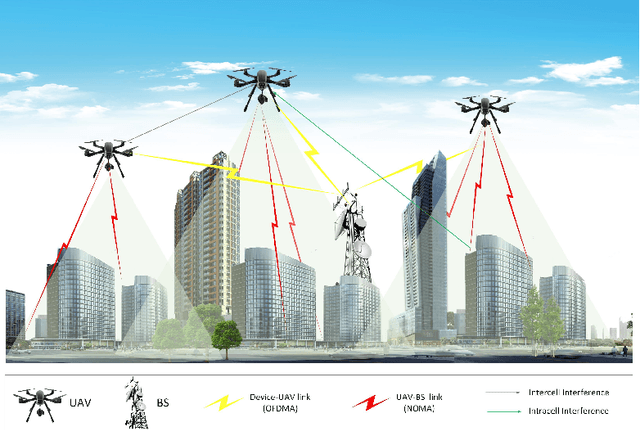
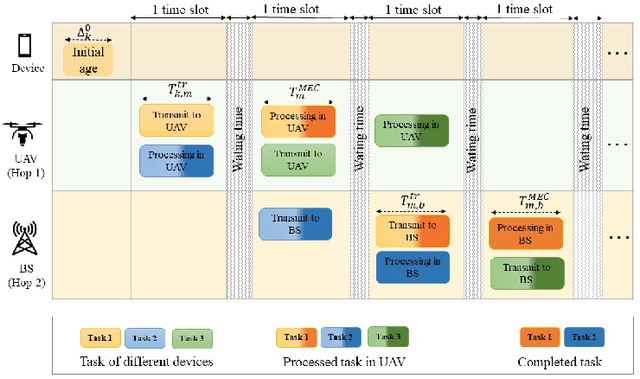
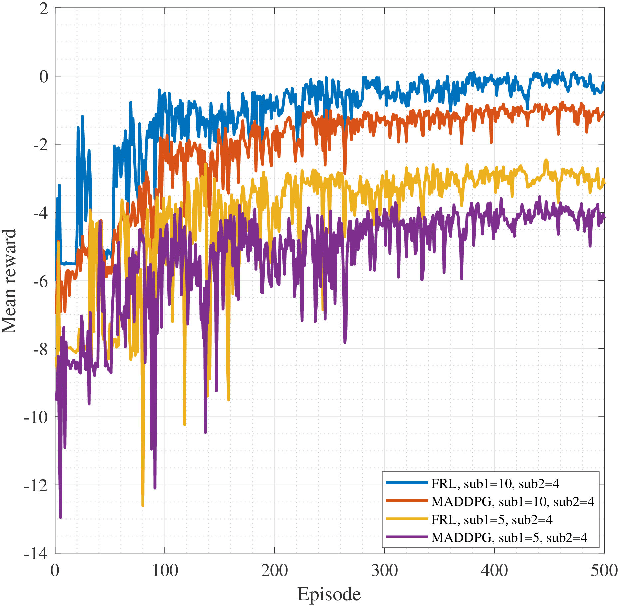
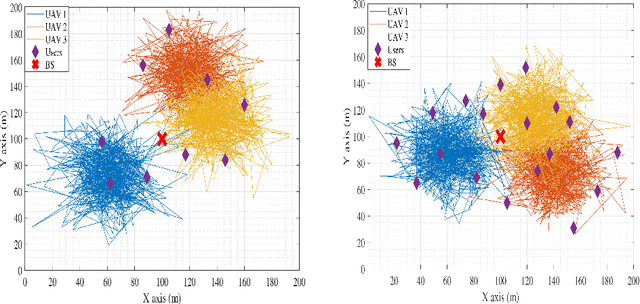
In this work, we adopt the emerging technology of mobile edge computing (MEC) in the Unmanned aerial vehicles (UAVs) for communication-computing systems, to optimize the age of information (AoI) in the network. We assume that tasks are processed jointly on UAVs and BS to enhance edge performance with limited connectivity and computing. Using UAVs and BS jointly with MEC can reduce AoI on the network. To maintain the freshness of the tasks, we formulate the AoI minimization in two-hop communication framework, the first hop at the UAVs and the second hop at the BS. To approach the challenge, we optimize the problem using a deep reinforcement learning (DRL) framework, called federated reinforcement learning (FRL). In our network we have two types of agents with different states and actions but with the same policy. Our FRL enables us to handle the two-step AoI minimization and UAV trajectory problems. In addition, we compare our proposed algorithm, which has a centralized processing unit to update the weights, with fully decentralized multi-agent deep deterministic policy gradient (MADDPG), which enhances the agent's performance. As a result, the suggested algorithm outperforms the MADDPG by about 38\%
Toward a Smart Resource Allocation Policy via Artificial Intelligence in 6G Networks: Centralized or Decentralized?
Feb 18, 2022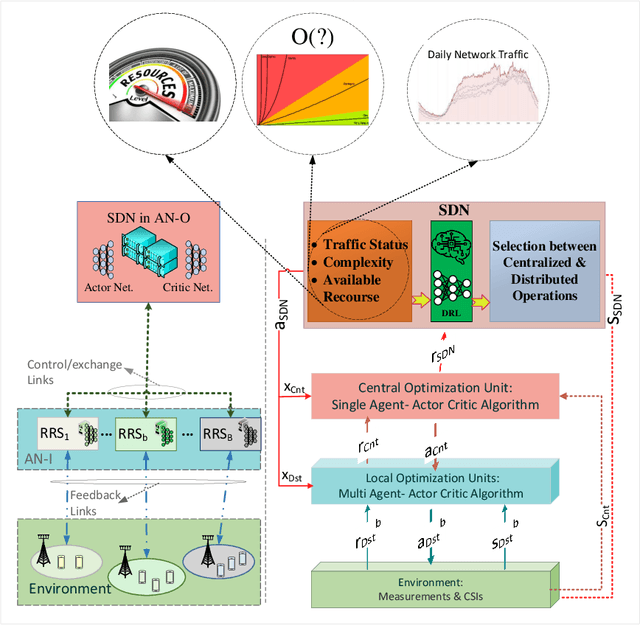
In this paper, we design a new smart softwaredefined radio access network (RAN) architecture with important properties like flexibility and traffic awareness for sixth generation (6G) wireless networks. In particular, we consider a hierarchical resource allocation framework for the proposed smart soft-RAN model, where the software-defined network (SDN) controller is the first and foremost layer of the framework. This unit dynamically monitors the network to select a network operation type on the basis of distributed or centralized resource allocation architectures to perform decision-making intelligently. In this paper, our aim is to make the network more scalable and more flexible in terms of achievable data rate, overhead, and complexity indicators. To this end, we introduce a new metric, throughput overhead complexity (TOC), for the proposed machine learning-based algorithm, which makes a trade-off between these performance indicators. In particular, the decision making based on TOC is solved via deep reinforcement learning (DRL), which determines an appropriate resource allocation policy. Furthermore, for the selected algorithm, we employ the soft actor-critic method, which is more accurate, scalable, and robust than other learning methods. Simulation results demonstrate that the proposed smart network achieves better performance in terms of TOC compared to fixed centralized or distributed resource management schemes that lack dynamism. Moreover, our proposed algorithm outperforms conventional learning methods employed in other state-of-the-art network designs.
AI-based Robust Resource Allocation in End-to-End Network Slicing under Demand and CSI Uncertainties
Feb 10, 2022Network slicing (NwS) is one of the main technologies in the fifth-generation of mobile communication and beyond (5G+). One of the important challenges in the NwS is information uncertainty which mainly involves demand and channel state information (CSI). Demand uncertainty is divided into three types: number of users requests, amount of bandwidth, and requested virtual network functions workloads. Moreover, the CSI uncertainty is modeled by three methods: worst-case, probabilistic, and hybrid. In this paper, our goal is to maximize the utility of the infrastructure provider by exploiting deep reinforcement learning algorithms in end-to-end NwS resource allocation under demand and CSI uncertainties. The proposed formulation is a nonconvex mixed-integer non-linear programming problem. To perform robust resource allocation in problems that involve uncertainty, we need a history of previous information. To this end, we use a recurrent deterministic policy gradient (RDPG) algorithm, a recurrent and memory-based approach in deep reinforcement learning. Then, we compare the RDPG method in different scenarios with soft actor-critic (SAC), deep deterministic policy gradient (DDPG), distributed, and greedy algorithms. The simulation results show that the SAC method is better than the DDPG, distributed, and greedy methods, respectively. Moreover, the RDPG method out performs the SAC approach on average by 70%.
Reconfigurable Intelligent Surface Enabled Spatial Multiplexing with Fully Convolutional Network
Jan 08, 2022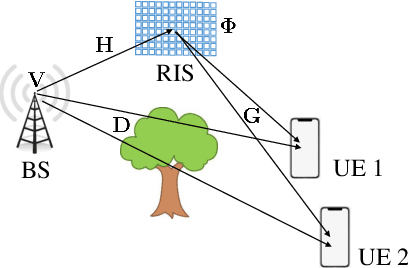
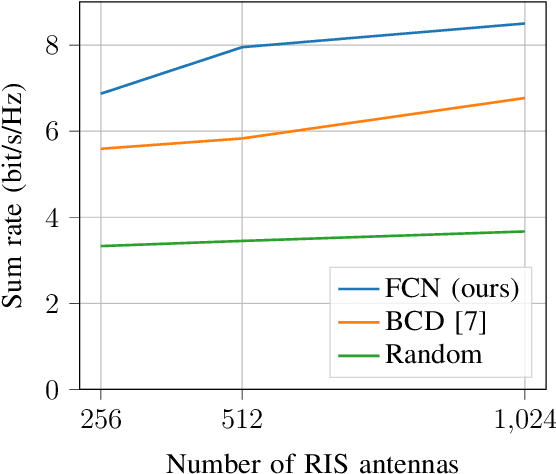
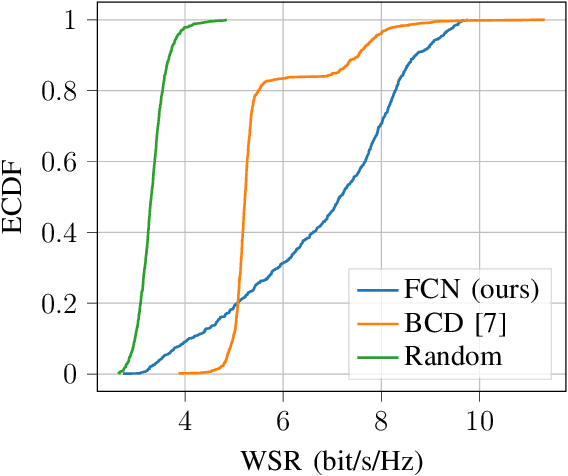
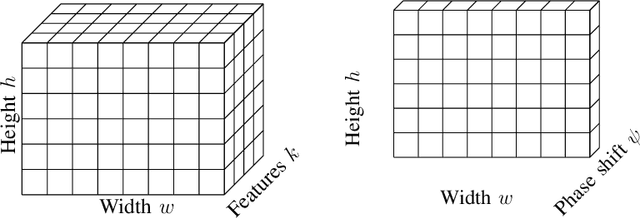
Reconfigurable intelligent surface (RIS) is an emerging technology for future wireless communication systems. In this work, we consider downlink spatial multiplexing enabled by the RIS for weighted sum-rate (WSR) maximization. In the literature, most solutions use alternating gradient-based optimization, which has moderate performance, high complexity, and limited scalability. We propose to apply a fully convolutional network (FCN) to solve this problem, which was originally designed for semantic segmentation of images. The rectangular shape of the RIS and the spatial correlation of channels with adjacent RIS antennas due to the short distance between them encourage us to apply it for the RIS configuration. We design a set of channel features that includes both cascaded channels via the RIS and the direct channel. In the base station (BS), the differentiable minimum mean squared error (MMSE) precoder is used for pretraining and the weighted minimum mean squared error (WMMSE) precoder is then applied for fine-tuning, which is nondifferentiable, more complex, but achieves a better performance. Evaluation results show that the proposed solution has higher performance and allows for a faster evaluation than the baselines. Hence it scales better to a large number of antennas, advancing the RIS one step closer to practical deployment.
Multi Agent Reinforcement Learning Trajectory Design and Two-Stage Resource Management in CoMP UAV VLC Networks
Dec 03, 2021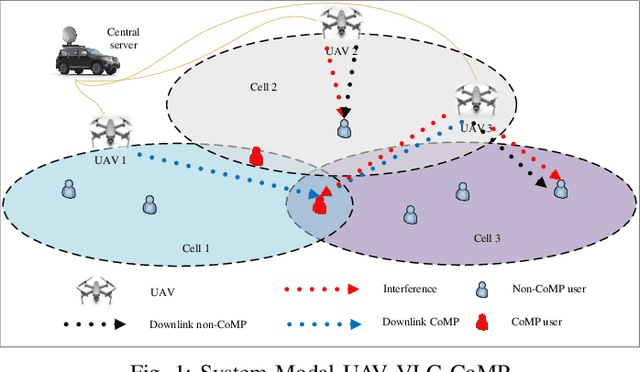
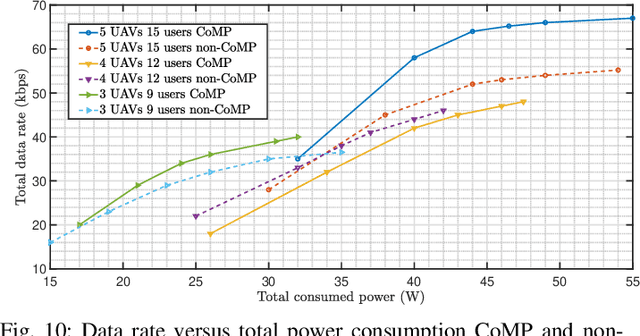
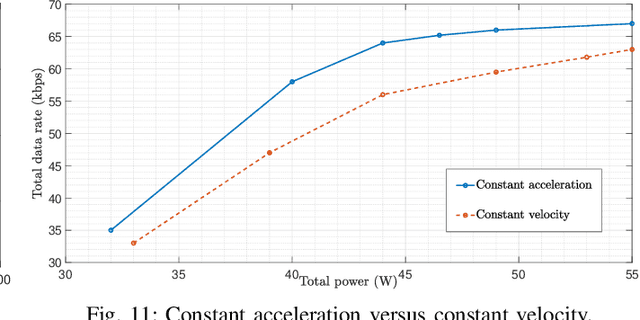
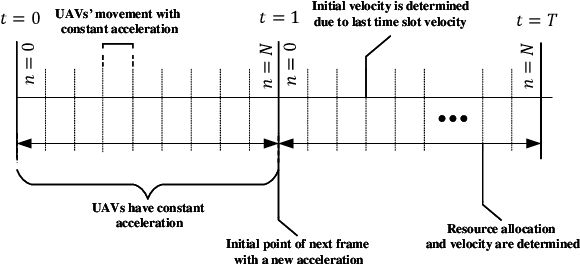
In this paper, we consider unmanned aerial vehicles (UAVs) equipped with a visible light communication (VLC) access point and coordinated multipoint (CoMP) capability that allows users to connect to more than one UAV. UAVs can move in 3-dimensional (3D) at a constant acceleration, where a central server is responsible for synchronization and cooperation among UAVs. The effect of accelerated motion in UAV is necessary to be considered. Unlike most existing works, we examine the effects of variable speed on kinetics and radio resource allocations. For the proposed system model, we define two different time frames. In the frame, the acceleration of each UAV is specified, and in each slot, radio resources are allocated. Our goal is to formulate a multiobjective optimization problem where the total data rate is maximized, and the total communication power consumption is minimized simultaneously. To handle this multiobjective optimization, we first apply the scalarization method and then apply multi-agent deep deterministic policy gradient (MADDPG). We improve this solution method by adding two critic networks together with two-stage resources allocation. Simulation results indicate that the constant acceleration motion of UAVs shows about 8\% better results than conventional motion systems in terms of performance.
AI-based Radio Resource Management and Trajectory Design for PD-NOMA Communication in IRS-UAV Assisted Networks
Nov 06, 2021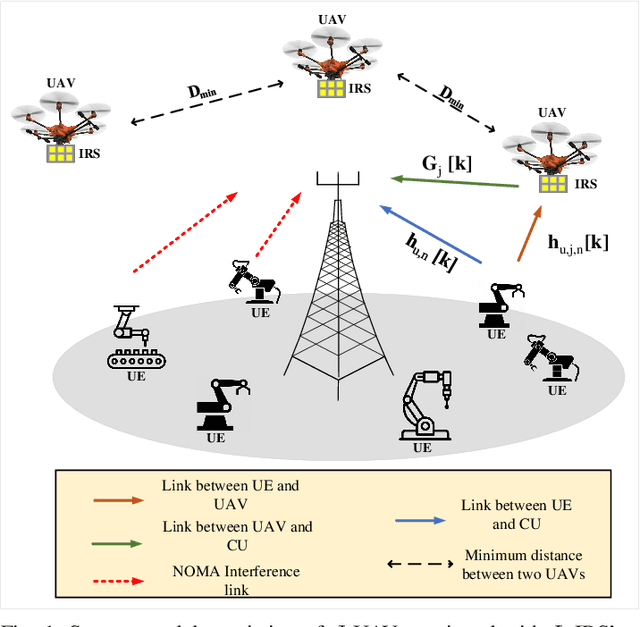
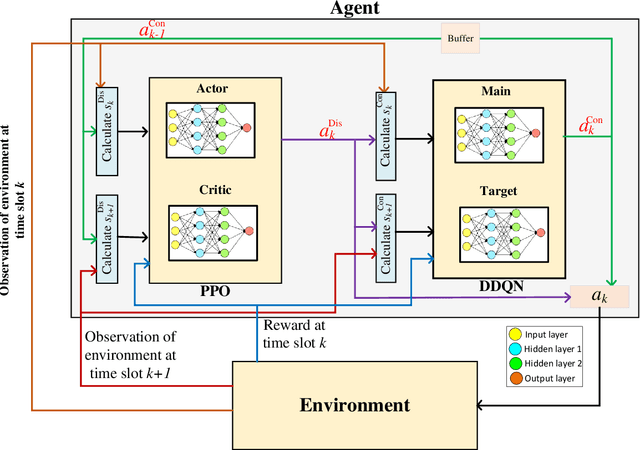
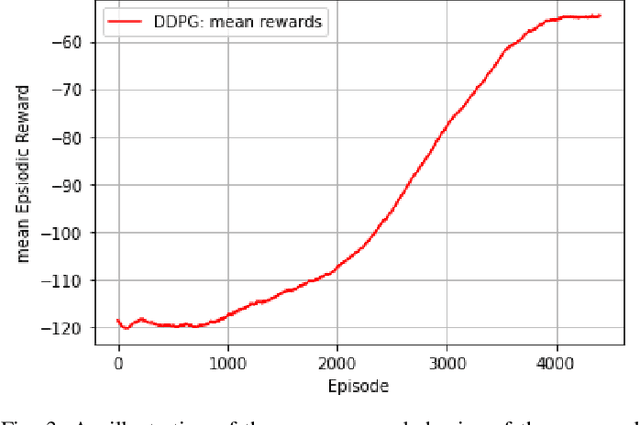
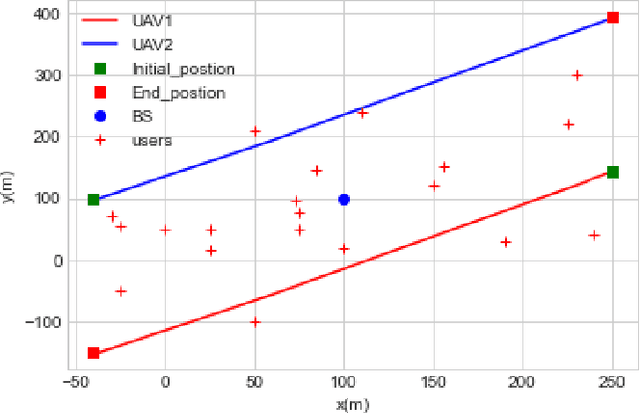
In this paper, we consider that the unmanned aerial vehicles (UAVs) with attached intelligent reflecting surfaces (IRSs) play the role of flying reflectors that reflect the signal of users to the destination, and utilize the power-domain non-orthogonal multiple access (PD-NOMA) scheme in the uplink. We investigate the benefits of the UAV-IRS on the internet of things (IoT) networks that improve the freshness of collected data of the IoT devices via optimizing power, sub-carrier, and trajectory variables, as well as, the phase shift matrix elements. We consider minimizing the average age-of-information (AAoI) of users subject to the maximum transmit power limitations, PD-NOMA-related restriction, and the constraints related to UAV's movement. The optimization problem consists of discrete and continuous variables. Hence, we divide the resource allocation problem into two sub-problems and use two different reinforcement learning (RL) based algorithms to solve them, namely the double deep Qnetwork (DDQN) and a proximal policy optimization (PPO). Our numerical results illustrate the performance gains that can be achieved for IRS enabled UAV communication systems. Moreover, we compare our deep RL (DRL) based algorithm with matching algorithm and random trajectory, showing the combination of DDQN and PPO algorithm proposed in this paper performs 10% and 15% better than matching algorithm and random-trajectory algorithm, respectively.
Reconfigurable Intelligent Surface Phase Hopping for Ultra-Reliable Communications
Jul 25, 2021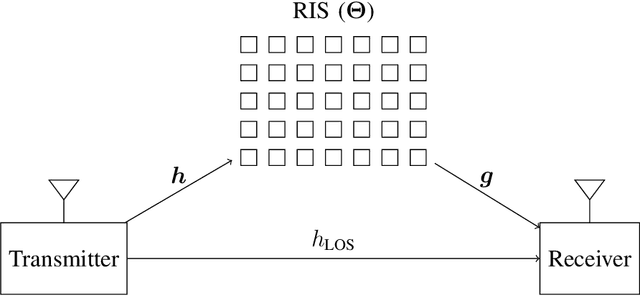
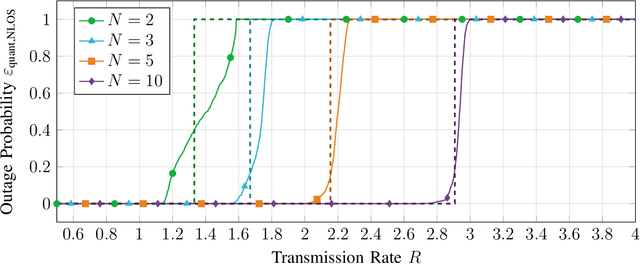
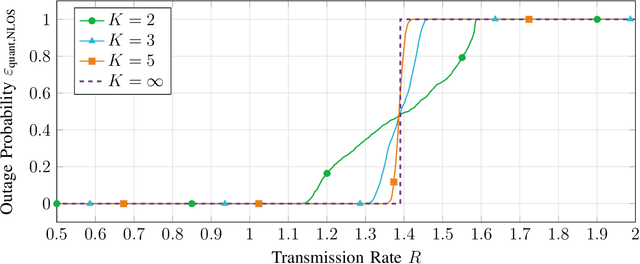
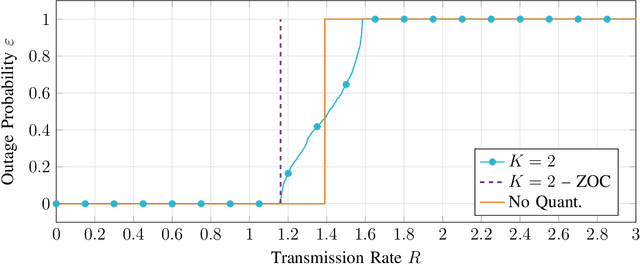
We introduce a phase hopping scheme for reconfigurable intelligent surfaces (RISs) in which the phases of the individual RIS elements are randomly varied with each transmitted symbol. This effectively converts slow fading into fast fading. We show how this can be leveraged to significantly improve the outage performance and even achieve an outage probability of zero at a positive data rate without channel state information (CSI) at the transmitter and RIS. Furthermore, the same result can be accomplished even if only two possible phase values are available. Since we do not require perfect CSI at the transmitter or RIS, the proposed scheme has no additional communication overhead for adjusting the phases. This enables robust ultra-reliable communications with a reduced effort for channel estimation.