 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePixelNav: Towards Model-based Vision-Only Navigation with Topological Graphs
Jul 28, 2025
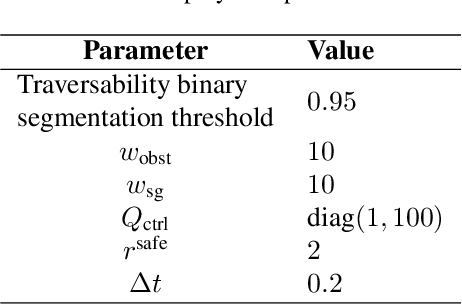

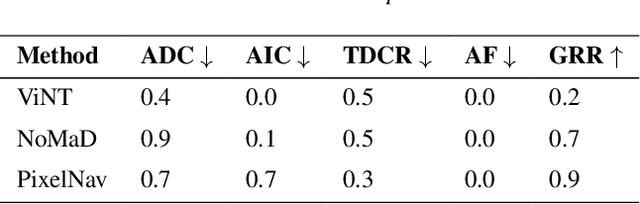
This work proposes a novel hybrid approach for vision-only navigation of mobile robots, which combines advances of both deep learning approaches and classical model-based planning algorithms. Today, purely data-driven end-to-end models are dominant solutions to this problem. Despite advantages such as flexibility and adaptability, the requirement of a large amount of training data and limited interpretability are the main bottlenecks for their practical applications. To address these limitations, we propose a hierarchical system that utilizes recent advances in model predictive control, traversability estimation, visual place recognition, and pose estimation, employing topological graphs as a representation of the target environment. Using such a combination, we provide a scalable system with a higher level of interpretability compared to end-to-end approaches. Extensive real-world experiments show the efficiency of the proposed method.
EgoWalk: A Multimodal Dataset for Robot Navigation in the Wild
May 27, 2025Data-driven navigation algorithms are critically dependent on large-scale, high-quality real-world data collection for successful training and robust performance in realistic and uncontrolled conditions. To enhance the growing family of navigation-related real-world datasets, we introduce EgoWalk - a dataset of 50 hours of human navigation in a diverse set of indoor/outdoor, varied seasons, and location environments. Along with the raw and Imitation Learning-ready data, we introduce several pipelines to automatically create subsidiary datasets for other navigation-related tasks, namely natural language goal annotations and traversability segmentation masks. Diversity studies, use cases, and benchmarks for the proposed dataset are provided to demonstrate its practical applicability. We openly release all data processing pipelines and the description of the hardware platform used for data collection to support future research and development in robot navigation systems.