 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning and reusing primitive behaviours to improve Hindsight Experience Replay sample efficiency
Oct 03, 2023

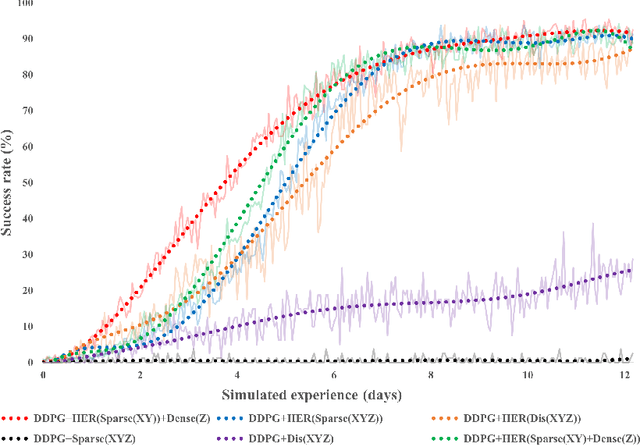
Hindsight Experience Replay (HER) is a technique used in reinforcement learning (RL) that has proven to be very efficient for training off-policy RL-based agents to solve goal-based robotic manipulation tasks using sparse rewards. Even though HER improves the sample efficiency of RL-based agents by learning from mistakes made in past experiences, it does not provide any guidance while exploring the environment. This leads to very large training times due to the volume of experience required to train an agent using this replay strategy. In this paper, we propose a method that uses primitive behaviours that have been previously learned to solve simple tasks in order to guide the agent toward more rewarding actions during exploration while learning other more complex tasks. This guidance, however, is not executed by a manually designed curriculum, but rather using a critic network to decide at each timestep whether or not to use the actions proposed by the previously-learned primitive policies. We evaluate our method by comparing its performance against HER and other more efficient variations of this algorithm in several block manipulation tasks. We demonstrate the agents can learn a successful policy faster when using our proposed method, both in terms of sample efficiency and computation time. Code is available at https://github.com/franroldans/qmp-her.
Robust Learning-Based Incipient Slip Detection using the PapillArray Optical Tactile Sensor for Improved Robotic Gripping
Jul 08, 2023The ability to detect slip, particularly incipient slip, enables robotic systems to take corrective measures to prevent a grasped object from being dropped. Therefore, slip detection can enhance the overall security of robotic gripping. However, accurately detecting incipient slip remains a significant challenge. In this paper, we propose a novel learning-based approach to detect incipient slip using the PapillArray (Contactile, Australia) tactile sensor. The resulting model is highly effective in identifying patterns associated with incipient slip, achieving a detection success rate of 95.6% when tested with an offline dataset. Furthermore, we introduce several data augmentation methods to enhance the robustness of our model. When transferring the trained model to a robotic gripping environment distinct from where the training data was collected, our model maintained robust performance, with a success rate of 96.8%, providing timely feedback for stabilizing several practical gripping tasks. Our project website: https://sites.google.com/view/incipient-slip-detection.
Winning Solution of Real Robot Challenge III
Jan 30, 2023



This report introduces our winning solution of the real-robot phase of the Real Robot Challenge (RRC) 2022. The goal of this year's challenge is to solve dexterous manipulation tasks with offline reinforcement learning (RL) or imitation learning. To this end, participants are provided with datasets containing dozens of hours of robotic data. For each task an expert and a mixed dataset are provided. In our experiments, when learning from the expert datasets, we find standard Behavioral Cloning (BC) outperforms state-of-the-art offline RL algorithms. When learning from the mixed datasets, BC performs poorly, as expected, while surprisingly offline RL performs suboptimally, failing to match the average performance of the baseline model used for collecting the datasets. To remedy this, motivated by the strong performance of BC on the expert datasets we elect to use a semi-supervised classification technique to filter the subset of expert data out from the mixed datasets, and subsequently perform BC on this extracted subset of data. To further improve results, in all settings we use a simple data augmentation method that exploits the geometric symmetry of the RRC physical robotic environment. Our submitted BC policies each surpass the mean return of their respective raw datasets, and the policies trained on the filtered mixed datasets come close to matching the performances of those trained on the expert datasets.
Behaviour Discriminator: A Simple Data Filtering Method to Improve Offline Policy Learning
Jan 27, 2023This paper studies the problem of learning a control policy without the need for interactions with the environment; instead, learning purely from an existing dataset. Prior work has demonstrated that offline learning algorithms (e.g., behavioural cloning and offline reinforcement learning) are more likely to discover a satisfactory policy when trained using high-quality expert data. However, many real-world/practical datasets can contain significant proportions of examples generated using low-skilled agents. Therefore, we propose a behaviour discriminator (BD) concept, a novel and simple data filtering approach based on semi-supervised learning, which can accurately discern expert data from a mixed-quality dataset. Our BD approach was used to pre-process the mixed-skill-level datasets from the Real Robot Challenge (RRC) III, an open competition requiring participants to solve several dexterous robotic manipulation tasks using offline learning methods; the new BD method allowed a standard behavioural cloning algorithm to outperform other more sophisticated offline learning algorithms. Moreover, we demonstrate that the new BD pre-processing method can be applied to a number of D4RL benchmark problems, improving the performance of multiple state-of-the-art offline reinforcement learning algorithms.
Hierarchical reinforcement learning for in-hand robotic manipulation using Davenport chained rotations
Oct 03, 2022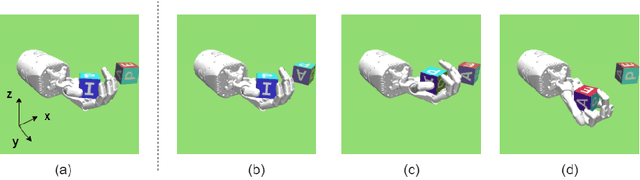
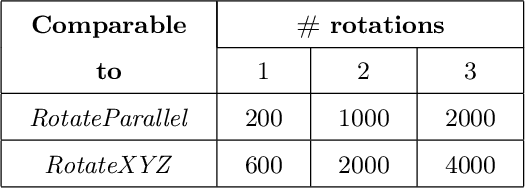
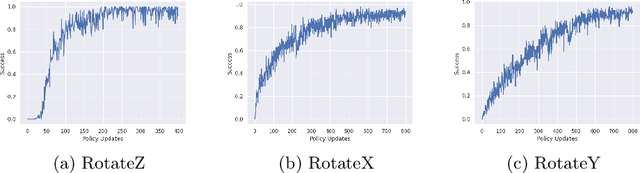

End-to-end reinforcement learning techniques are among the most successful methods for robotic manipulation tasks. However, the training time required to find a good policy capable of solving complex tasks is prohibitively large. Therefore, depending on the computing resources available, it might not be feasible to use such techniques. The use of domain knowledge to decompose manipulation tasks into primitive skills, to be performed in sequence, could reduce the overall complexity of the learning problem, and hence reduce the amount of training required to achieve dexterity. In this paper, we propose the use of Davenport chained rotations to decompose complex 3D rotation goals into a concatenation of a smaller set of more simple rotation skills. State-of-the-art reinforcement-learning-based methods can then be trained using less overall simulated experience. We compare its performance with the popular Hindsight Experience Replay method, trained in an end-to-end fashion using the same amount of experience in a simulated robotic hand environment. Despite a general decrease in performance of the primitive skills when being sequentially executed, we find that decomposing arbitrary 3D rotations into elementary rotations is beneficial when computing resources are limited, obtaining increases of success rates of approximately 10% on the most complex 3D rotations with respect to the success rates obtained by HER trained in an end-to-end fashion, and increases of success rates between 20% and 40% on the most simple rotations.
Dexterous Robotic Manipulation using Deep Reinforcement Learning and Knowledge Transfer for Complex Sparse Reward-based Tasks
May 19, 2022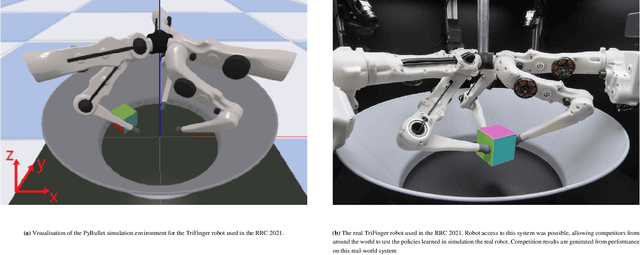


This paper describes a deep reinforcement learning (DRL) approach that won Phase 1 of the Real Robot Challenge (RRC) 2021, and then extends this method to a more difficult manipulation task. The RRC consisted of using a TriFinger robot to manipulate a cube along a specified positional trajectory, but with no requirement for the cube to have any specific orientation. We used a relatively simple reward function, a combination of goal-based sparse reward and distance reward, in conjunction with Hindsight Experience Replay (HER) to guide the learning of the DRL agent (Deep Deterministic Policy Gradient (DDPG)). Our approach allowed our agents to acquire dexterous robotic manipulation strategies in simulation. These strategies were then applied to the real robot and outperformed all other competition submissions, including those using more traditional robotic control techniques, in the final evaluation stage of the RRC. Here we extend this method, by modifying the task of Phase 1 of the RRC to require the robot to maintain the cube in a particular orientation, while the cube is moved along the required positional trajectory. The requirement to also orient the cube makes the agent unable to learn the task through blind exploration due to increased problem complexity. To circumvent this issue, we make novel use of a Knowledge Transfer (KT) technique that allows the strategies learned by the agent in the original task (which was agnostic to cube orientation) to be transferred to this task (where orientation matters). KT allowed the agent to learn and perform the extended task in the simulator, which improved the average positional deviation from 0.134 m to 0.02 m, and average orientation deviation from 142{\deg} to 76{\deg} during evaluation. This KT concept shows good generalisation properties and could be applied to any actor-critic learning algorithm.