 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRadio-based Multi-Robot Odometry and Relative Localization
Sep 30, 2025Radio-based methods such as Ultra-Wideband (UWB) and RAdio Detection And Ranging (radar), which have traditionally seen limited adoption in robotics, are experiencing a boost in popularity thanks to their robustness to harsh environmental conditions and cluttered environments. This work proposes a multi-robot UGV-UAV localization system that leverages the two technologies with inexpensive and readily-available sensors, such as Inertial Measurement Units (IMUs) and wheel encoders, to estimate the relative position of an aerial robot with respect to a ground robot. The first stage of the system pipeline includes a nonlinear optimization framework to trilaterate the location of the aerial platform based on UWB range data, and a radar pre-processing module with loosely coupled ego-motion estimation which has been adapted for a multi-robot scenario. Then, the pre-processed radar data as well as the relative transformation are fed to a pose-graph optimization framework with odometry and inter-robot constraints. The system, implemented for the Robotic Operating System (ROS 2) with the Ceres optimizer, has been validated in Software-in-the-Loop (SITL) simulations and in a real-world dataset. The proposed relative localization module outperforms state-of-the-art closed-form methods which are less robust to noise. Our SITL environment includes a custom Gazebo plugin for generating realistic UWB measurements modeled after real data. Conveniently, the proposed factor graph formulation makes the system readily extensible to full Simultaneous Localization And Mapping (SLAM). Finally, all the code and experimental data is publicly available to support reproducibility and to serve as a common open dataset for benchmarking.
Long Duration Inspection of GNSS-Denied Environments with a Tethered UAV-UGV Marsupial System
May 29, 2025Unmanned Aerial Vehicles (UAVs) have become essential tools in inspection and emergency response operations due to their high maneuverability and ability to access hard-to-reach areas. However, their limited battery life significantly restricts their use in long-duration missions. This paper presents a novel tethered marsupial robotic system composed of a UAV and an Unmanned Ground Vehicle (UGV), specifically designed for autonomous, long-duration inspection tasks in Global Navigation Satellite System (GNSS)-denied environments. The system extends the UAV's operational time by supplying power through a tether connected to high-capacity battery packs carried by the UGV. We detail the hardware architecture based on off-the-shelf components to ensure replicability and describe our full-stack software framework, which is composed of open-source components and built upon the Robot Operating System (ROS). The proposed software architecture enables precise localization using a Direct LiDAR Localization (DLL) method and ensures safe path planning and coordinated trajectory tracking for the integrated UGV-tether-UAV system. We validate the system through three field experiments: (1) a manual flight endurance test to estimate the operational duration, (2) an autonomous navigation test, and (3) an inspection mission to demonstrate autonomous inspection capabilities. Experimental results confirm the robustness and autonomy of the system, its capacity to operate in GNSS-denied environments, and its potential for long-endurance, autonomous inspection and monitoring tasks.
ars548_ros. An ARS 548 RDI radar driver for ROS2
Apr 06, 2024



The ARS 548 RDI Radar is a premium model of the fifth generation of 77 GHz long range radar sensors with new RF antenna arrays, which offer digital beam forming. This radar measures independently the distance, speed and angle of objects without any reflectors in one measurement cycle based on Pulse Compression with New Frequency Modulation [1]. Unfortunately, there were not any drivers available for Linux systems to make the user able to analyze the data acquired from this sensor to the best of our knowledge. In this paper, we present a driver that is able to interpret the data from the ARS 548 RDI sensor and produce data in Robot Operation System version 2 (ROS2). Thus, this data can be stored, represented and analyzed by using the powerful tools offered by ROS2. Besides, our driver offers advanced object features provided by the sensor, such as relative estimated velocity and acceleration of each object, its orientation and angular velocity. We focus on the configuration of the sensor and the use of our driver and advanced filtering and representation tools, offering a video tutorial for these purposes. Finally, a dataset acquired with this sensor and an Ouster OS1-32 LiDAR sensor for baseline purposes is available, so that the user can check the correctness of our driver.
Skyeye Team at MBZIRC 2020: A team of aerial and ground robots for GPS-denied autonomous fire extinguishing in an urban building scenario
Apr 05, 2021
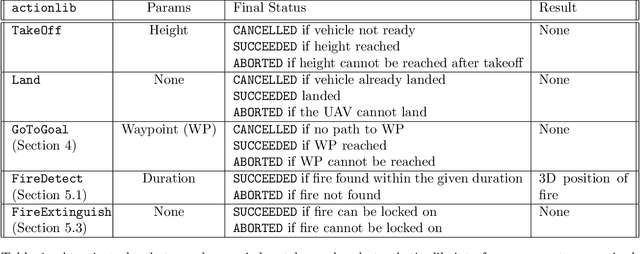
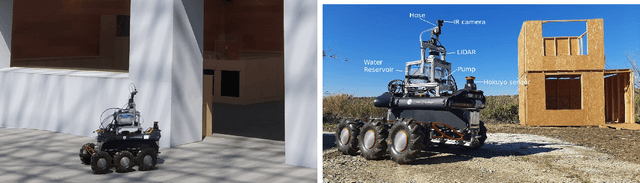
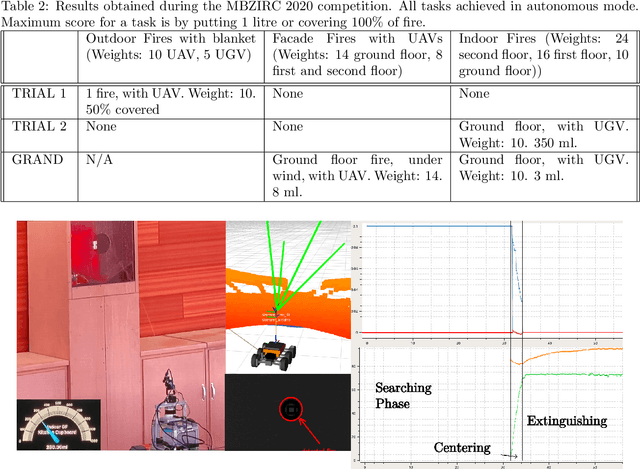
The paper presents a presents a framework for fire extinguishing in an urban scenario by a team of aerial and ground robots. The system was developed for the Challenge 3 of the 2020 Mohamed Bin Zayed International Robotics Challenge (MBZIRC). The challenge required to autonomously detect, locate and extinguish fires in different floors of a building, as well as in the surroundings. The multi-robot system developed consists of a heterogeneous robot team of up to three Unmanned Aerial Vehicles (UAV) and one Unmanned Ground Vehicle (UGV). The paper describes the main hardware and software components for UAV and UGV platforms. It also presents the main algorithmic components of the system: a 3D LIDAR-based mapping and localization module able to work in GPS-denied scenarios; a global planner and a fast local re-planning system for robot navigation; infrared-based perception and robot actuation control for fire extinguishing; and a mission executive and coordination module based on Behavior Trees. The paper finally describes the results obtained during competition, where the system worked fully autonomously and scored in all the trials performed. The system contributed to the third place achieved by the Skyeye team in the Grand Challenge of MBZIRC 2020.