 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDALD-PCAC: Density-Adaptive Learning Descriptor for Point Cloud Lossless Attribute Compression
Jan 18, 2026Recently, deep learning has significantly advanced the performance of point cloud geometry compression. However, the learning-based lossless attribute compression of point clouds with varying densities is under-explored. In this paper, we develop a learning-based framework, namely DALD-PCAC that leverages Levels of Detail (LoD) to tailor for point cloud lossless attribute compression. We develop a point-wise attention model using a permutation-invariant Transformer to tackle the challenges of sparsity and irregularity of point clouds during context modeling. We also propose a Density-Adaptive Learning Descriptor (DALD) capable of capturing structure and correlations among points across a large range of neighbors. In addition, we develop a prior-guided block partitioning to reduce the attribute variance within blocks and enhance the performance. Experiments on LiDAR and object point clouds show that DALD-PCAC achieves the state-of-the-art performance on most data. Our method boosts the compression performance and is robust to the varying densities of point clouds. Moreover, it guarantees a good trade-off between performance and complexity, exhibiting great potential in real-world applications. The source code is available at https://github.com/zb12138/DALD_PCAC.
DeepRAHT: Learning Predictive RAHT for Point Cloud Attribute Compression
Jan 18, 2026Regional Adaptive Hierarchical Transform (RAHT) is an effective point cloud attribute compression (PCAC) method. However, its application in deep learning lacks research. In this paper, we propose an end-to-end RAHT framework for lossy PCAC based on the sparse tensor, called DeepRAHT. The RAHT transform is performed within the learning reconstruction process, without requiring manual RAHT for preprocessing. We also introduce the predictive RAHT to reduce bitrates and design a learning-based prediction model to enhance performance. Moreover, we devise a bitrate proxy that applies run-length coding to entropy model, achieving seamless variable-rate coding and improving robustness. DeepRAHT is a reversible and distortion-controllable framework, ensuring its lower bound performance and offering significant application potential. The experiments demonstrate that DeepRAHT is a high-performance, faster, and more robust solution than the baseline methods. Project Page: https://github.com/zb12138/DeepRAHT.
OctAttention: Octree-based Large-scale Contexts Model for Point Cloud Compression
Feb 12, 2022
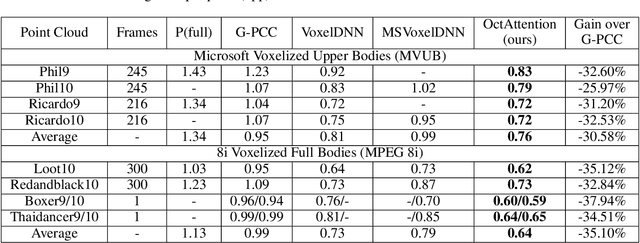
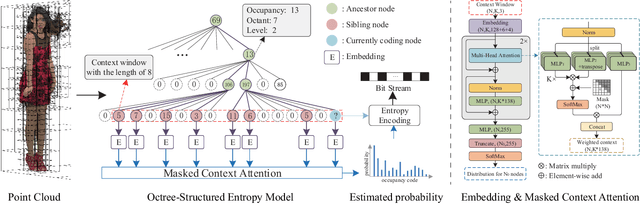
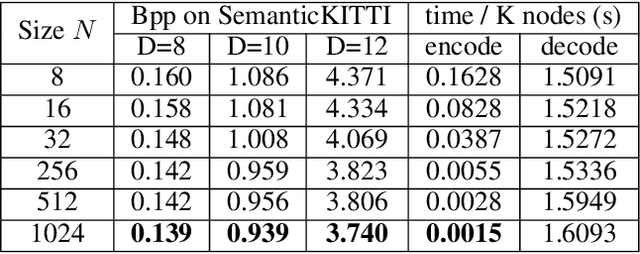
In point cloud compression, sufficient contexts are significant for modeling the point cloud distribution. However, the contexts gathered by the previous voxel-based methods decrease when handling sparse point clouds. To address this problem, we propose a multiple-contexts deep learning framework called OctAttention employing the octree structure, a memory-efficient representation for point clouds. Our approach encodes octree symbol sequences in a lossless way by gathering the information of sibling and ancestor nodes. Expressly, we first represent point clouds with octree to reduce spatial redundancy, which is robust for point clouds with different resolutions. We then design a conditional entropy model with a large receptive field that models the sibling and ancestor contexts to exploit the strong dependency among the neighboring nodes and employ an attention mechanism to emphasize the correlated nodes in the context. Furthermore, we introduce a mask operation during training and testing to make a trade-off between encoding time and performance. Compared to the previous state-of-the-art works, our approach obtains a 10%-35% BD-Rate gain on the LiDAR benchmark (e.g. SemanticKITTI) and object point cloud dataset (e.g. MPEG 8i, MVUB), and saves 95% coding time compared to the voxel-based baseline. The code is available at https://github.com/zb12138/OctAttention.