 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIndividualized Federated Learning for Traffic Prediction with Error Driven Aggregation
Jul 17, 2024



Low-latency traffic prediction is vital for smart city traffic management. Federated Learning has emerged as a promising technique for Traffic Prediction (FLTP), offering several advantages such as privacy preservation, reduced communication overhead, improved prediction accuracy, and enhanced adaptability to changing traffic conditions. However, majority of the current FLTP frameworks lack a real-time model updating scheme, which hinders their ability to continuously incorporate new incoming traffic data and adapt effectively to the changing dynamics of traffic trends. Another concern with the existing FLTP frameworks is their reliance on the conventional FL model aggregation method, which involves assigning an identical model (i.e., the global model) to all traffic monitoring devices to predict their individual local traffic trends, thereby neglecting the non-IID characteristics of traffic data collected in different locations. Building upon these findings and harnessing insights from reinforcement learning, we propose NeighborFL, an individualized real-time federated learning scheme that introduces a haversine distance-based and error-driven, personalized local models grouping heuristic from the perspective of each individual traffic node. This approach allows NeighborFL to create location-aware and tailored prediction models for each client while fostering collaborative learning. Simulations demonstrate the effectiveness of NeighborFL, offering improved real-time prediction accuracy over three baseline models, with one experimental setting showing a 16.9% reduction in MSE value compared to a naive FL setting.
B^2SFL: A Bi-level Blockchained Architecture for Secure Federated Learning-based Traffic Prediction
Oct 23, 2023



Federated Learning (FL) is a privacy-preserving machine learning (ML) technology that enables collaborative training and learning of a global ML model based on aggregating distributed local model updates. However, security and privacy guarantees could be compromised due to malicious participants and the centralized FL server. This article proposed a bi-level blockchained architecture for secure federated learning-based traffic prediction. The bottom and top layer blockchain store the local model and global aggregated parameters accordingly, and the distributed homomorphic-encrypted federated averaging (DHFA) scheme addresses the secure computation problems. We propose the partial private key distribution protocol and a partially homomorphic encryption/decryption scheme to achieve the distributed privacy-preserving federated averaging model. We conduct extensive experiments to measure the running time of DHFA operations, quantify the read and write performance of the blockchain network, and elucidate the impacts of varying regional group sizes and model complexities on the resulting prediction accuracy for the online traffic flow prediction task. The results indicate that the proposed system can facilitate secure and decentralized federated learning for real-world traffic prediction tasks.
Robust Blockchained Federated Learning with Model Validation and Proof-of-Stake Inspired Consensus
Jan 09, 2021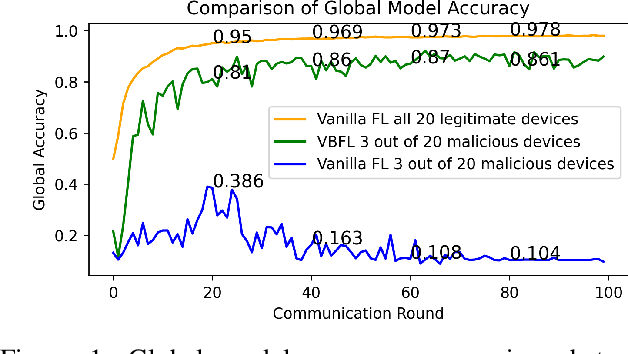
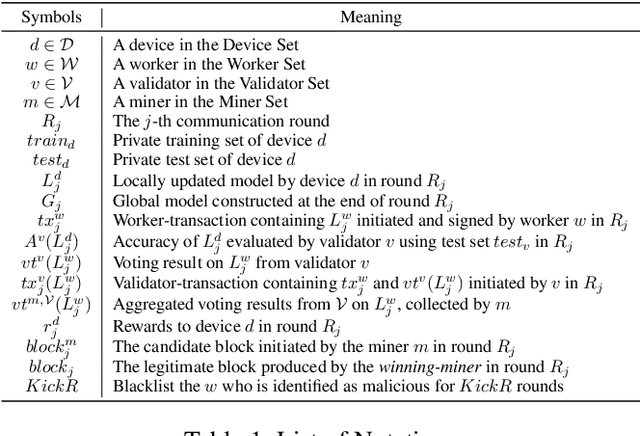
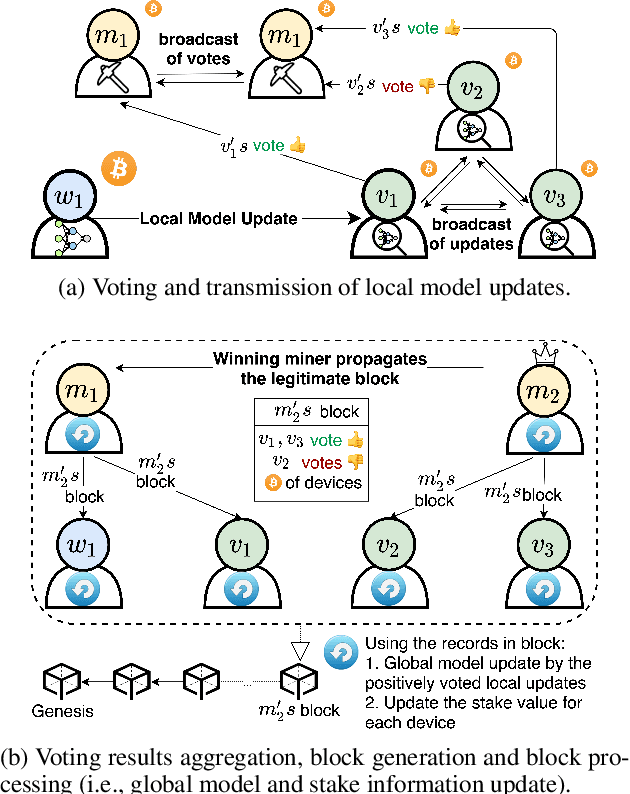
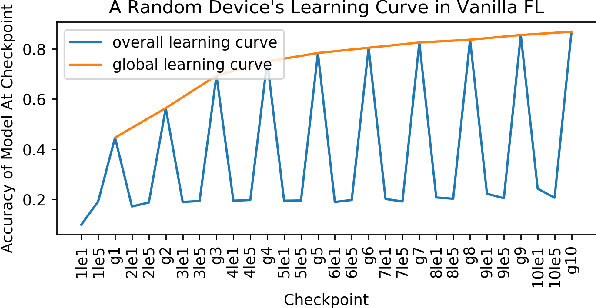
Federated learning (FL) is a promising distributed learning solution that only exchanges model parameters without revealing raw data. However, the centralized architecture of FL is vulnerable to the single point of failure. In addition, FL does not examine the legitimacy of local models, so even a small fraction of malicious devices can disrupt global training. To resolve these robustness issues of FL, in this paper, we propose a blockchain-based decentralized FL framework, termed VBFL, by exploiting two mechanisms in a blockchained architecture. First, we introduced a novel decentralized validation mechanism such that the legitimacy of local model updates is examined by individual validators. Second, we designed a dedicated proof-of-stake consensus mechanism where stake is more frequently rewarded to honest devices, which protects the legitimate local model updates by increasing their chances of dictating the blocks appended to the blockchain. Together, these solutions promote more federation within legitimate devices, enabling robust FL. Our emulation results of the MNIST classification corroborate that with 15% of malicious devices, VBFL achieves 87% accuracy, which is 7.4x higher than Vanilla FL.
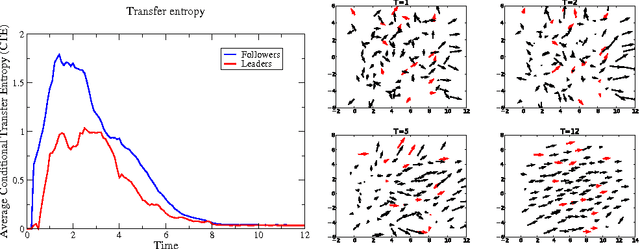
Information Transfer in Swarms with Leaders
Jun 30, 2014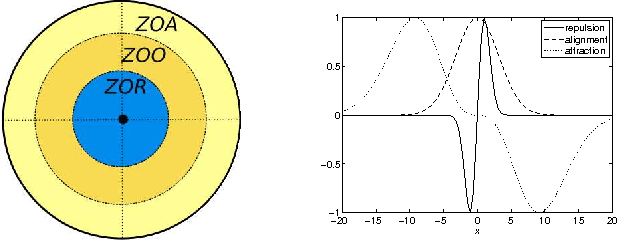
Swarm dynamics is the study of collections of agents that interact with one another without central control. In natural systems, insects, birds, fish and other large mammals function in larger units to increase the overall fitness of the individuals. Their behavior is coordinated through local interactions to enhance mate selection, predator detection, migratory route identification and so forth [Andersson and Wallander 2003; Buhl et al. 2006; Nagy et al. 2010; Partridge 1982; Sumpter et al. 2008]. In artificial systems, swarms of autonomous agents can augment human activities such as search and rescue, and environmental monitoring by covering large areas with multiple nodes [Alami et al. 2007; Caruso et al. 2008; Ogren et al. 2004; Paley et al. 2007; Sibley et al. 2002]. In this paper, we explore the interplay between swarm dynamics, covert leadership and theoretical information transfer. A leader is a member of the swarm that acts upon information in addition to what is provided by local interactions. Depending upon the leadership model, leaders can use their external information either all the time or in response to local conditions [Couzin et al. 2005; Sun et al. 2013]. A covert leader is a leader that is treated no differently than others in the swarm, so leaders and followers participate equally in whatever interaction model is used [Rossi et al. 2007]. In this study, we use theoretical information transfer as a means of analyzing swarm interactions to explore whether or not it is possible to distinguish between followers and leaders based on interactions within the swarm. We find that covert leaders can be distinguished from followers in a swarm because they receive less transfer entropy than followers.