 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStatistical MIA: Rethinking Membership Inference Attack for Reliable Unlearning Auditing
Feb 01, 2026Machine unlearning (MU) is essential for enforcing the right to be forgotten in machine learning systems. A key challenge of MU is how to reliably audit whether a model has truly forgotten specified training data. Membership Inference Attacks (MIAs) are widely used for unlearning auditing, where samples that evade membership detection are often regarded as successfully forgotten. After carefully revisiting the reliability of MIA, we show that this assumption is flawed: failed membership inference does not imply true forgetting. We theoretically demonstrate that MIA-based auditing, when formulated as a binary classification problem, inevitably incurs statistical errors whose magnitude cannot be observed during the auditing process. This leads to overly optimistic evaluations of unlearning performance, while incurring substantial computational overhead due to shadow model training. To address these limitations, we propose Statistical Membership Inference Attack (SMIA), a novel training-free and highly effective auditing framework. SMIA directly compares the distributions of member and non-member data using statistical tests, eliminating the need for learned attack models. Moreover, SMIA outputs both a forgetting rate and a corresponding confidence interval, enabling quantified reliability of the auditing results. Extensive experiments show that SMIA provides more reliable auditing with significantly lower computational cost than existing MIA-based approaches. Notably, the theoretical guarantees and empirical effectiveness of SMIA suggest it as a new paradigm for reliable machine unlearning auditing.
Biased-Attention Guided Risk Prediction for Safe Decision-Making at Unsignalized Intersections
Oct 14, 2025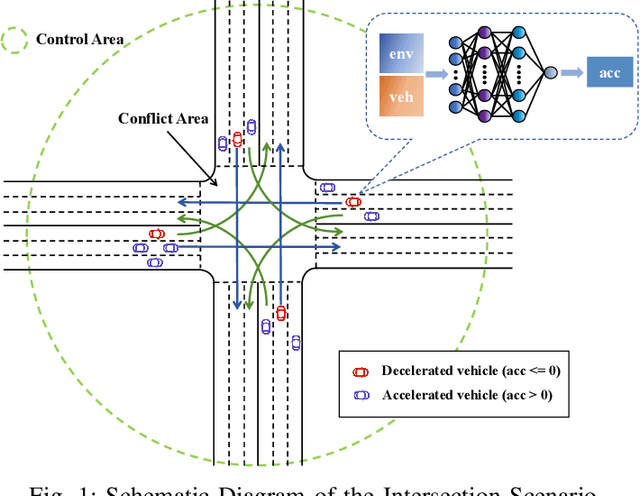
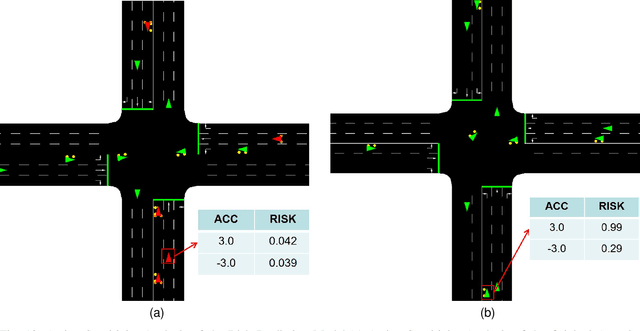
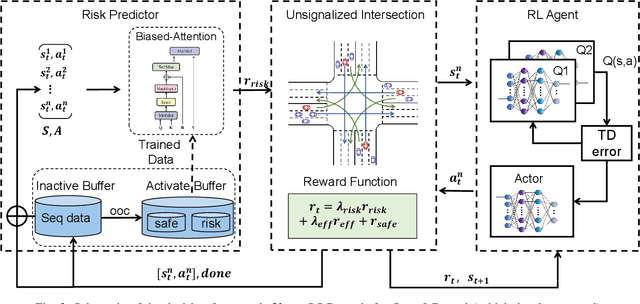
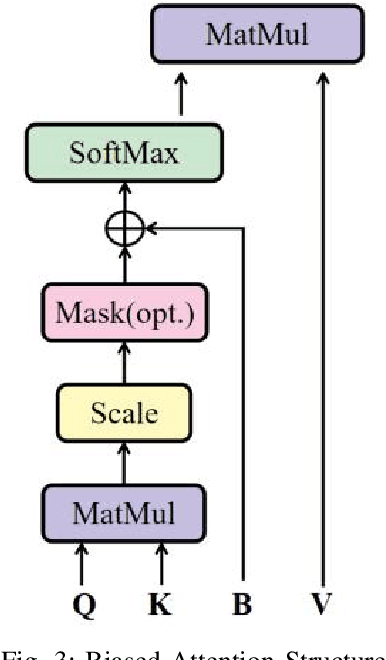
Autonomous driving decision-making at unsignalized intersections is highly challenging due to complex dynamic interactions and high conflict risks. To achieve proactive safety control, this paper proposes a deep reinforcement learning (DRL) decision-making framework integrated with a biased attention mechanism. The framework is built upon the Soft Actor-Critic (SAC) algorithm. Its core innovation lies in the use of biased attention to construct a traffic risk predictor. This predictor assesses the long-term risk of collision for a vehicle entering the intersection and transforms this risk into a dense reward signal to guide the SAC agent in making safe and efficient driving decisions. Finally, the simulation results demonstrate that the proposed method effectively improves both traffic efficiency and vehicle safety at the intersection, thereby proving the effectiveness of the intelligent decision-making framework in complex scenarios. The code of our work is available at https://github.com/hank111525/SAC-RWB.
A Thermoplastic Elastomer Belt Based Robotic Gripper
Jun 24, 2020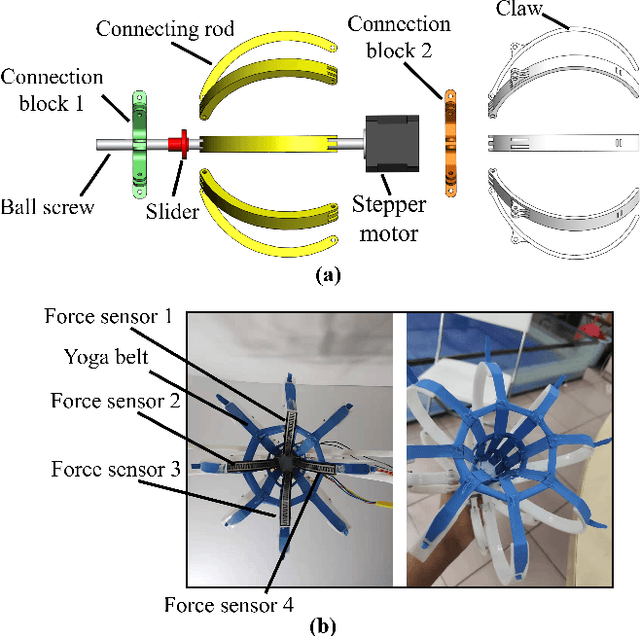
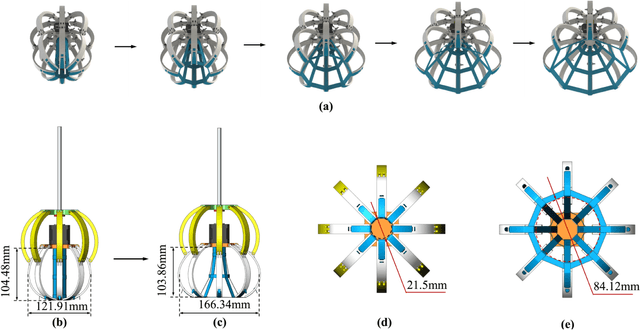
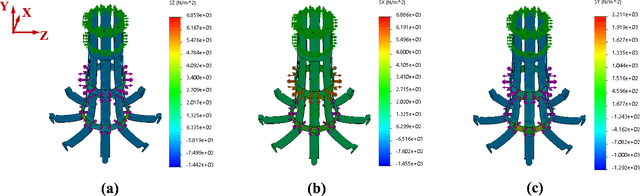
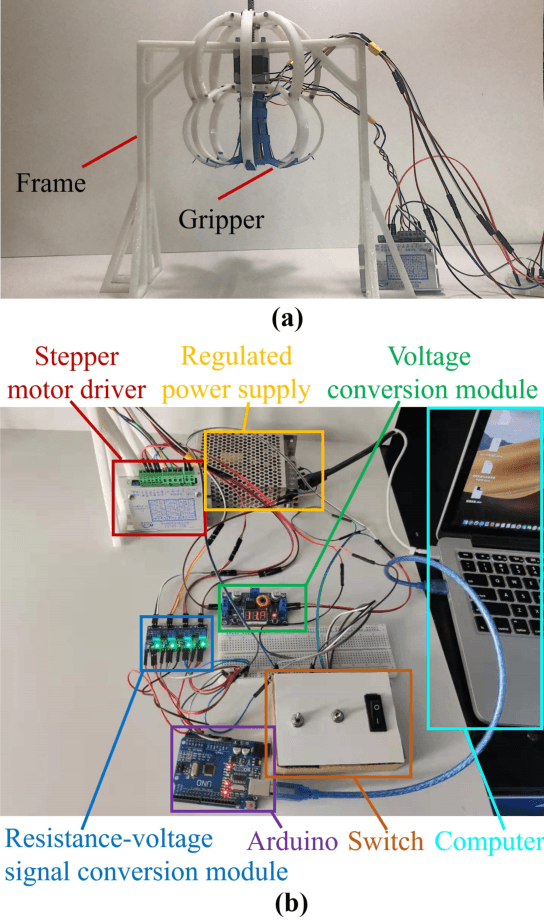
Novel robotic grippers have captured increasing interests recently because of their abilities to adapt to varieties of circumstances and their powerful functionalities. Differing from traditional gripper with mechanical components-made fingers, novel robotic grippers are typically made of novel structures and materials, using a novel manufacturing process. In this paper, a novel robotic gripper with external frame and internal thermoplastic elastomer belt-made net is proposed. The gripper grasps objects using the friction between the net and objects. It has the ability of adaptive gripping through flexible contact surface. Stress simulation has been used to explore the regularity between the normal stress on the net and the deformation of the net. Experiments are conducted on a variety of objects to measure the force needed to reliably grip and hold the object. Test results show that the gripper can successfully grip objects with varying shape, dimensions, and textures. It is promising that the gripper can be used for grasping fragile objects in the industry or out in the field, and also grasping the marine organisms without hurting them.