 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTriple Spectral Fusion for Sensor-based Human Activity Recognition
May 04, 2026The field of sensor-based human activity recognition (HAR) mainly uses posture, motion and context data of Inertial Measurement Units (IMUs) to identify daily activities. Despite the advancements in learning-based methods, it is challenging to perform information fusion from the temporal perspective due to the complexities in fusing heterogeneous sensor data and establishing long-term context correlations. This paper proposes a novel triple spectral fusion framework tailored for HAR. First, we develop an adaptive complementary filtering technique for noise suppression and organize each IMU's sensors into posture and motion modality nodes. Given that IMU nodes form a dynamic heterogeneous graph, we then apply adaptive filtering within the graph Fourier domain to merge both homogeneous and heterogeneous node information. Furthermore, an adaptive wavelet frequency selection approach is implemented to suppress context redundancy and shorten the length of features. This approach enhances both timestamp-based graph aggregation and the correlation of long-term contexts. Our framework uses adaptive filtering in the Fourier, graph Fourier, and wavelet domains, enabling effective multi-sensor fusion and context correlation. Extensive experiments on ten benchmark datasets demonstrate the superior performance of our framework. Project page: https://github.com/crocodilegogogo/TSF-TPAMI2026.
Efficient Recruitment Strategy for Collaborative Mobile Crowd Sensing Based on GCN Trustworthiness Prediction
Jun 07, 2023



Collaborative Mobile Crowd Sensing (CMCS) enhances data quality and coverage by promoting teamwork in task sensing, with worker recruitment representing a complex multi-objective optimization problem. Existing strategies mainly focus on the characteristics of workers themselves, neglecting the asymmetric trust relationships between them, which affects the rationality of task utility evaluation. To address this, this paper first employs the Mini-Batch K-Means clustering algorithm and deploys edge servers to enable efficient distributed worker recruitment. Historical data and task requirements are utilized to obtain workers' ability types and distances. A trust-directed graph in the worker's social network is input into the Graph Convolutional Network (GCN) framework for training, capturing asymmetric trustworthiness between worker pairs. Privacy leakage is prevented in CMCS scenarios through high trust values between workers. Ultimately, an undirected recruitment graph is constructed using workers' abilities, trust values, and distance weights, transforming the worker recruitment problem into a Maximum Weight Average Subgraph Problem (MWASP). A Tabu Search Recruitment (TSR) algorithm is proposed to rationally recruit a balanced multi-objective optimal task utility worker set for each task. Extensive simulation experiments on four real-world datasets demonstrate the effectiveness of the proposed strategy, outperforming other strategies.
EdgeLoc: An Edge-IoT Framework for Robust Indoor Localization Using Capsule Networks
Sep 12, 2020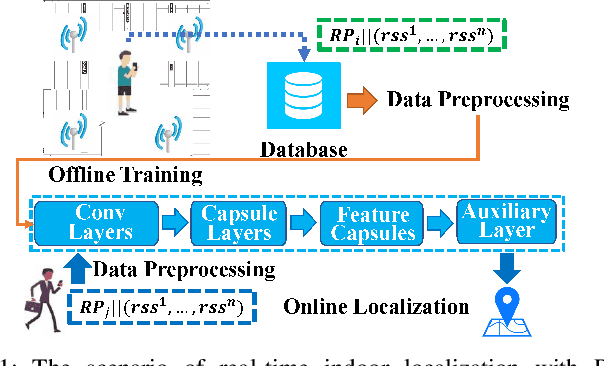
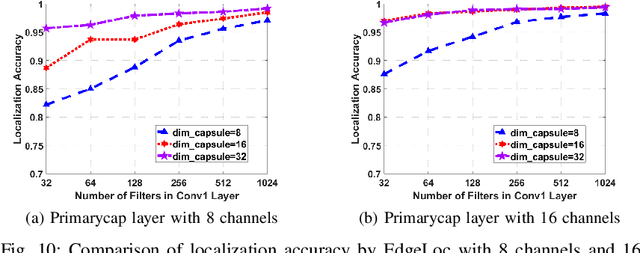
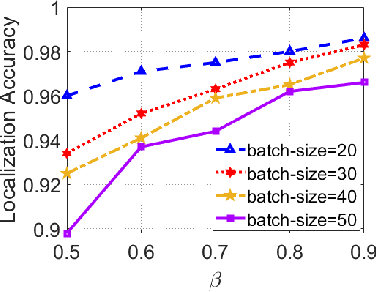
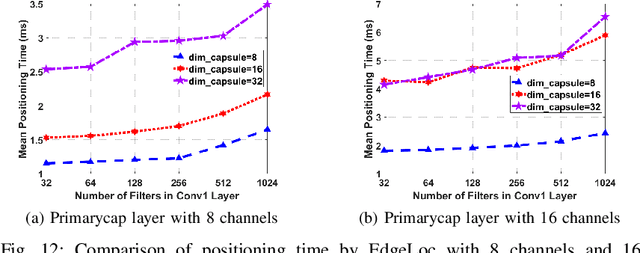
With the unprecedented demand for location-based services in indoor scenarios, wireless indoor localization has become essential for mobile users. While GPS is not available at indoor spaces, WiFi RSS fingerprinting has become popular with its ubiquitous accessibility. However, it is challenging to achieve robust and efficient indoor localization with two major challenges. First, the localization accuracy can be degraded by the random signal fluctuations, which would influence conventional localization algorithms that simply learn handcrafted features from raw fingerprint data. Second, mobile users are sensitive to the localization delay, but conventional indoor localization algorithms are computation-intensive and time-consuming. In this paper, we propose EdgeLoc, an edge-IoT framework for efficient and robust indoor localization using capsule networks. We develop a deep learning model with the CapsNet to efficiently extract hierarchical information from WiFi fingerprint data, thereby significantly improving the localization accuracy. Moreover, we implement an edge-computing prototype system to achieve a nearly real-time localization process, by enabling mobile users with the deep-learning model that has been well-trained by the edge server. We conduct a real-world field experimental study with over 33,600 data points and an extensive synthetic experiment with the open dataset, and the experimental results validate the effectiveness of EdgeLoc. The best trade-off of the EdgeLoc system achieves 98.5% localization accuracy within an average positioning time of only 2.31 ms in the field experiment.