 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Camera to World: A Plug-and-Play Module for Human Mesh Transformation
Dec 17, 2025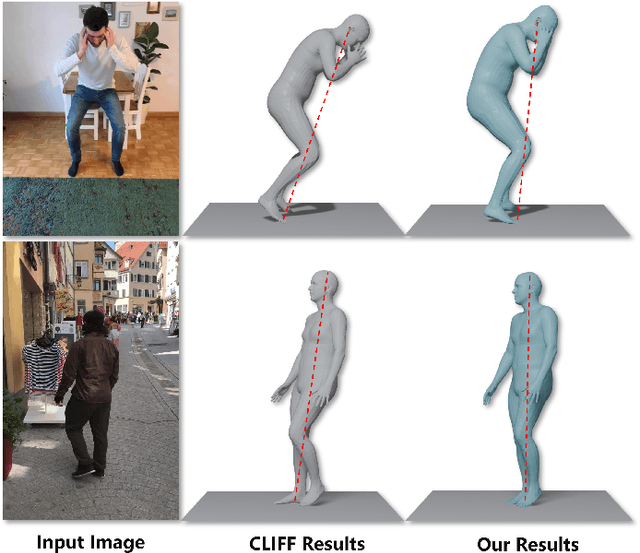
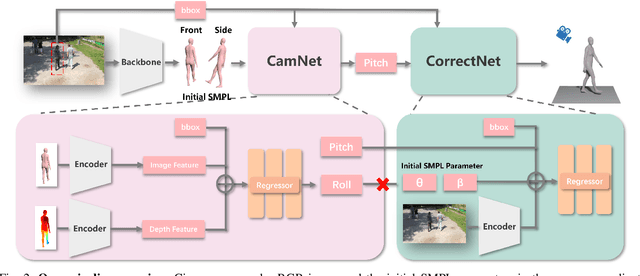
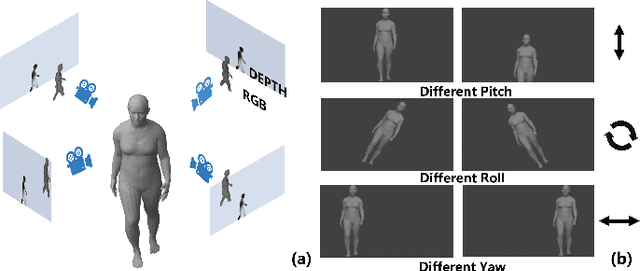
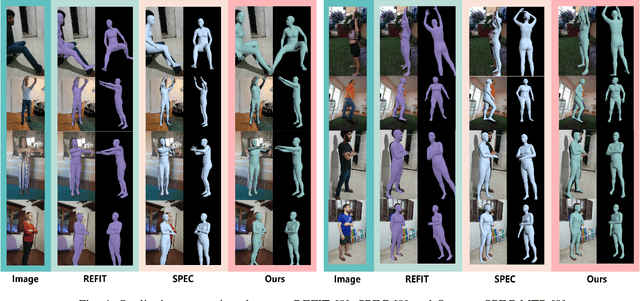
Reconstructing accurate 3D human meshes in the world coordinate system from in-the-wild images remains challenging due to the lack of camera rotation information. While existing methods achieve promising results in the camera coordinate system by assuming zero camera rotation, this simplification leads to significant errors when transforming the reconstructed mesh to the world coordinate system. To address this challenge, we propose Mesh-Plug, a plug-and-play module that accurately transforms human meshes from camera coordinates to world coordinates. Our key innovation lies in a human-centered approach that leverages both RGB images and depth maps rendered from the initial mesh to estimate camera rotation parameters, eliminating the dependency on environmental cues. Specifically, we first train a camera rotation prediction module that focuses on the human body's spatial configuration to estimate camera pitch angle. Then, by integrating the predicted camera parameters with the initial mesh, we design a mesh adjustment module that simultaneously refines the root joint orientation and body pose. Extensive experiments demonstrate that our framework outperforms state-of-the-art methods on the benchmark datasets SPEC-SYN and SPEC-MTP.
PressTrack-HMR: Pressure-Based Top-Down Multi-Person Global Human Mesh Recovery
Nov 13, 2025Multi-person global human mesh recovery (HMR) is crucial for understanding crowd dynamics and interactions. Traditional vision-based HMR methods sometimes face limitations in real-world scenarios due to mutual occlusions, insufficient lighting, and privacy concerns. Human-floor tactile interactions offer an occlusion-free and privacy-friendly alternative for capturing human motion. Existing research indicates that pressure signals acquired from tactile mats can effectively estimate human pose in single-person scenarios. However, when multiple individuals walk randomly on the mat simultaneously, how to distinguish intermingled pressure signals generated by different persons and subsequently acquire individual temporal pressure data remains a pending challenge for extending pressure-based HMR to the multi-person situation. In this paper, we present \textbf{PressTrack-HMR}, a top-down pipeline that recovers multi-person global human meshes solely from pressure signals. This pipeline leverages a tracking-by-detection strategy to first identify and segment each individual's pressure signal from the raw pressure data, and subsequently performs HMR for each extracted individual signal. Furthermore, we build a multi-person interaction pressure dataset \textbf{MIP}, which facilitates further research into pressure-based human motion analysis in multi-person scenarios. Experimental results demonstrate that our method excels in multi-person HMR using pressure data, with 89.2 $mm$ MPJPE and 112.6 $mm$ WA-MPJPE$_{100}$, and these showcase the potential of tactile mats for ubiquitous, privacy-preserving multi-person action recognition. Our dataset & code are available at https://github.com/Jiayue-Yuan/PressTrack-HMR.