 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCAVERS: Multimodal SLAM Data from a Natural Karstic Cave with Ground Truth Motion Capture
Apr 16, 2026Autonomous robots operating in natural karstic caves face perception and navigation challenges that are qualitatively distinct from those encountered in mines or tunnels: irregular geometry, reflective wet surfaces, near-zero ambient light, and complex branching passages. Yet publicly available datasets targeting this environment remain scarce and offer limited sensing modalities and environmental diversity. We present CAVERS, a multimodal dataset acquired in two structurally distinct rooms of Cueva de la Victoria, Málaga, Spain, comprising 24 sequences totaling approximately 335 GB of recorded data. The sensor suite combines an Intel RealSense D435i RGB-D-I camera, an Optris PI640i near-IR thermal camera, and a Velodyne VLP-16 LiDAR, operated both handheld and mounted on a wheeled rover under full darkness and artificial illumination. For most of the sequences, mm-accurate 6-DoF ground truth pose and velocity at 120 Hz are provided by an Optirack motion capture system installed directly inside the cave. We benchmark seven state-of-the-art SLAM and odometry algorithms spanning visual, visual-inertial, thermal-inertial, and LiDAR-based pipelines, as well as a 3D reconstruction pipeline, demonstrating the dataset's usability. %The dataset and all supplementary material are publicly available at: https://github.com/spaceuma/cavers.
High-fidelity 3D reconstruction for planetary exploration
Feb 14, 2026Planetary exploration increasingly relies on autonomous robotic systems capable of perceiving, interpreting, and reconstructing their surroundings in the absence of global positioning or real-time communication with Earth. Rovers operating on planetary surfaces must navigate under sever environmental constraints, limited visual redundancy, and communication delays, making onboard spatial awareness and visual localization key components for mission success. Traditional techniques based on Structure-from-Motion (SfM) and Simultaneous Localization and Mapping (SLAM) provide geometric consistency but struggle to capture radiometric detail or to scale efficiently in unstructured, low-texture terrains typical of extraterrestrial environments. This work explores the integration of radiance field-based methods - specifically Neural Radiance Fields (NeRF) and Gaussian Splatting - into a unified, automated environment reconstruction pipeline for planetary robotics. Our system combines the Nerfstudio and COLMAP frameworks with a ROS2-compatible workflow capable of processing raw rover data directly from rosbag recordings. This approach enables the generation of dense, photorealistic, and metrically consistent 3D representations from minimal visual input, supporting improved perception and planning for autonomous systems operating in planetary-like conditions. The resulting pipeline established a foundation for future research in radiance field-based mapping, bridging the gap between geometric and neural representations in planetary exploration.
* 7 pages, 3 figures, conference paper
Multi-stage warm started optimal motion planning for over-actuated mobile platforms
Jul 29, 2022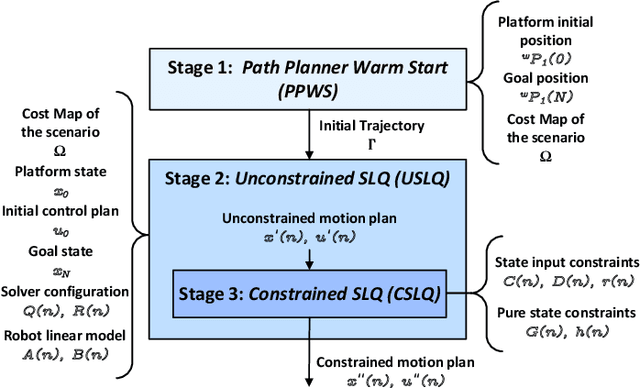
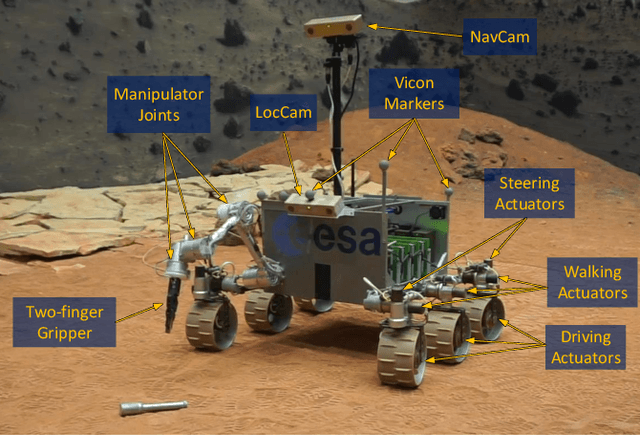
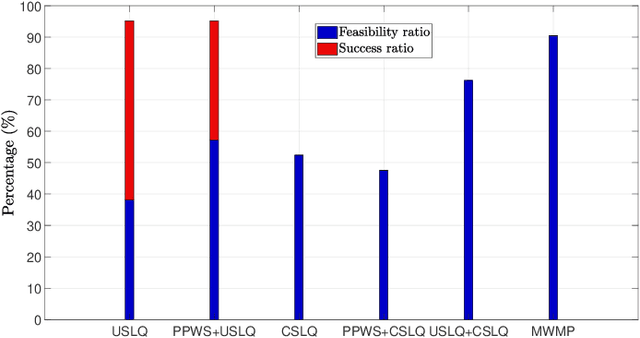
This work presents a computationally lightweight motion planner for over-actuated platforms. For this purpose, a general state-space model for mobile platforms with several kinematic chains is defined, which considers non-linearities and constraints. The proposed motion planner is based on a sequential multi-stage approach that takes advantage of the warm start on each step. Firstly, a globally optimal and smooth 2D/3D trajectory is generated using the Fast Marching Method. This trajectory is fed as a warm start to a sequential linear quadratic regulator that is able to generate an optimal motion plan without constraints for all the platform actuators. Finally, a feasible motion plan is generated considering the constraints defined in the model. In this respect, the sequential linear quadratic regulator is employed again, taking the previously generated unconstrained motion plan as a warm start. This novel approach has been deployed into the Exomars Testing Rover of the European Space Agency. This rover is an Ackermann-capable planetary exploration testbed that is equipped with a robotic arm. Several experiments were carried out demonstrating that the proposed approach speeds up the computation time, increasing the success ratio for a martian sample retrieval mission, which can be considered as a representative use case of an over-actuated mobile platform.