 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural posterior estimation of the neutrino direction in IceCube using transformer-encoded normalizing flows on the sphere
Apr 21, 2026IceCube is a cubic-kilometer-scale neutrino detector located at the geographic South Pole. A precise directional reconstruction of IceCube neutrinos is vital for associations with astronomical objects. In this context, we discuss neural posterior estimation of the neutrino direction via a transformer encoder that maps to a normalizing flow on the 2-sphere. It achieves a new state-of-the-art angular resolution for the two main event morphologies in IceCube - tracks and showers - while being significantly faster than traditional B-spline-based likelihood reconstructions. All-sky scans can be performed within seconds rather than hours, and take constant computation time, regardless of whether the posterior extent is arc-minutes or spans the whole sky. We utilize a combination of $C^2$-smooth rational-quadratic splines, scale transformations and rotations to define a novel spherical normalizing-flow distribution whose parameters are predicted as a whole as the output of the transformer encoder. We test several structural choices diverting from the vanilla transformer architecture. In particular, we find dual residual streams, nonlinear QKV projection and a separate class token with its own cross-attention processing to boost test-time performance. The angular resolution for both showers and tracks improves substantially over the whole trained energy range from 100 GeV to 100 PeV. At 100 TeV deposited energy, for example, the median angular resolution improves by a factor of $1.3$ for throughgoing tracks, by a factor of $1.7$ for showers and by a factor of $2.5$ for starting tracks compared to state-of-the art likelihood reconstructions based on B-splines. While previous machine-learning (ML) efforts have managed to obtain competitive shower resolutions, this is the first time an ML-based method outperforms likelihood-based muon reconstructions above 100 GeV.
Multi-stage warm started optimal motion planning for over-actuated mobile platforms
Jul 29, 2022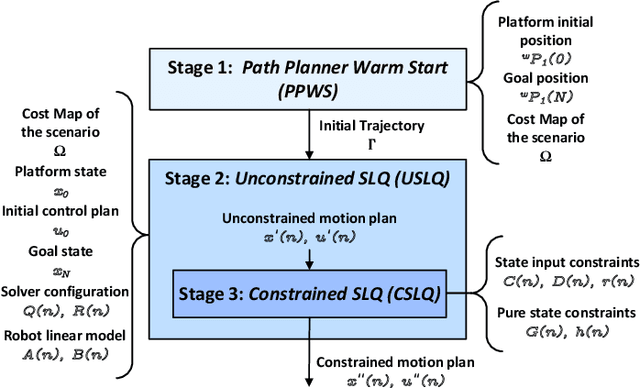
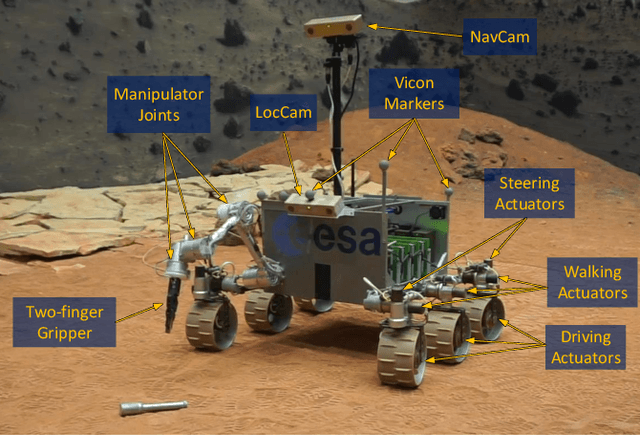
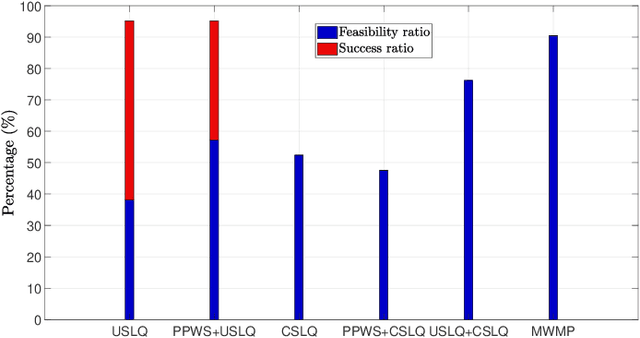
This work presents a computationally lightweight motion planner for over-actuated platforms. For this purpose, a general state-space model for mobile platforms with several kinematic chains is defined, which considers non-linearities and constraints. The proposed motion planner is based on a sequential multi-stage approach that takes advantage of the warm start on each step. Firstly, a globally optimal and smooth 2D/3D trajectory is generated using the Fast Marching Method. This trajectory is fed as a warm start to a sequential linear quadratic regulator that is able to generate an optimal motion plan without constraints for all the platform actuators. Finally, a feasible motion plan is generated considering the constraints defined in the model. In this respect, the sequential linear quadratic regulator is employed again, taking the previously generated unconstrained motion plan as a warm start. This novel approach has been deployed into the Exomars Testing Rover of the European Space Agency. This rover is an Ackermann-capable planetary exploration testbed that is equipped with a robotic arm. Several experiments were carried out demonstrating that the proposed approach speeds up the computation time, increasing the success ratio for a martian sample retrieval mission, which can be considered as a representative use case of an over-actuated mobile platform.