 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpotlighting Task-Relevant Features: Object-Centric Representations for Better Generalization in Robotic Manipulation
Jan 29, 2026The generalization capabilities of robotic manipulation policies are heavily influenced by the choice of visual representations. Existing approaches typically rely on representations extracted from pre-trained encoders, using two dominant types of features: global features, which summarize an entire image via a single pooled vector, and dense features, which preserve a patch-wise embedding from the final encoder layer. While widely used, both feature types mix task-relevant and irrelevant information, leading to poor generalization under distribution shifts, such as changes in lighting, textures, or the presence of distractors. In this work, we explore an intermediate structured alternative: Slot-Based Object-Centric Representations (SBOCR), which group dense features into a finite set of object-like entities. This representation permits to naturally reduce the noise provided to the robotic manipulation policy while keeping enough information to efficiently perform the task. We benchmark a range of global and dense representations against intermediate slot-based representations, across a suite of simulated and real-world manipulation tasks ranging from simple to complex. We evaluate their generalization under diverse visual conditions, including changes in lighting, texture, and the presence of distractors. Our findings reveal that SBOCR-based policies outperform dense and global representation-based policies in generalization settings, even without task-specific pretraining. These insights suggest that SBOCR is a promising direction for designing visual systems that generalize effectively in dynamic, real-world robotic environments.
Robotic Manipulation via Imitation Learning: Taxonomy, Evolution, Benchmark, and Challenges
Aug 24, 2025



Robotic Manipulation (RM) is central to the advancement of autonomous robots, enabling them to interact with and manipulate objects in real-world environments. This survey focuses on RM methodologies that leverage imitation learning, a powerful technique that allows robots to learn complex manipulation skills by mimicking human demonstrations. We identify and analyze the most influential studies in this domain, selected based on community impact and intrinsic quality. For each paper, we provide a structured summary, covering the research purpose, technical implementation, hierarchical classification, input formats, key priors, strengths and limitations, and citation metrics. Additionally, we trace the chronological development of imitation learning techniques within RM policy (RMP), offering a timeline of key technological advancements. Where available, we report benchmark results and perform quantitative evaluations to compare existing methods. By synthesizing these insights, this review provides a comprehensive resource for researchers and practitioners, highlighting both the state of the art and the challenges that lie ahead in the field of robotic manipulation through imitation learning.
Object-Centric Representations Improve Policy Generalization in Robot Manipulation
May 16, 2025Visual representations are central to the learning and generalization capabilities of robotic manipulation policies. While existing methods rely on global or dense features, such representations often entangle task-relevant and irrelevant scene information, limiting robustness under distribution shifts. In this work, we investigate object-centric representations (OCR) as a structured alternative that segments visual input into a finished set of entities, introducing inductive biases that align more naturally with manipulation tasks. We benchmark a range of visual encoders-object-centric, global and dense methods-across a suite of simulated and real-world manipulation tasks ranging from simple to complex, and evaluate their generalization under diverse visual conditions including changes in lighting, texture, and the presence of distractors. Our findings reveal that OCR-based policies outperform dense and global representations in generalization settings, even without task-specific pretraining. These insights suggest that OCR is a promising direction for designing visual systems that generalize effectively in dynamic, real-world robotic environments.
BioLeaf: a professional mobile application to measure foliar damage caused by insect herbivory
Sep 27, 2016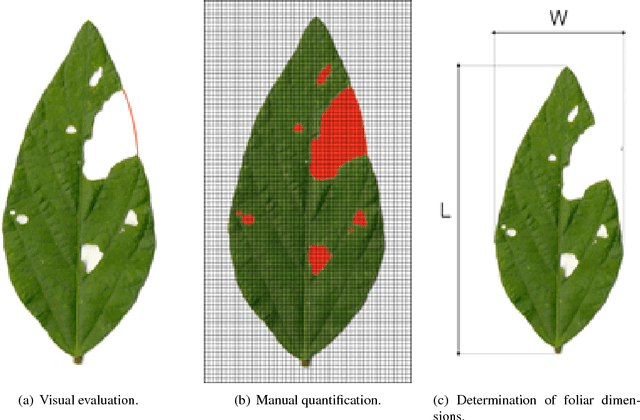
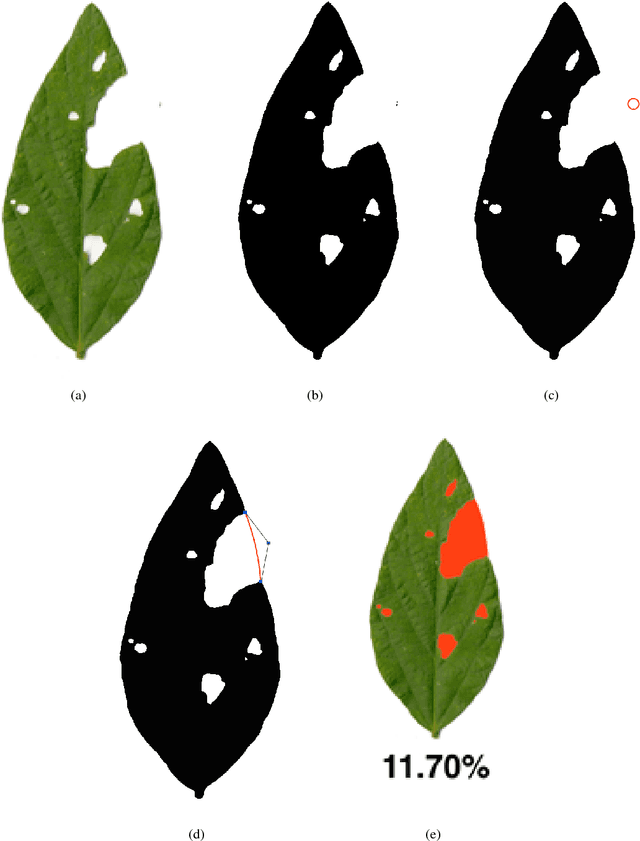
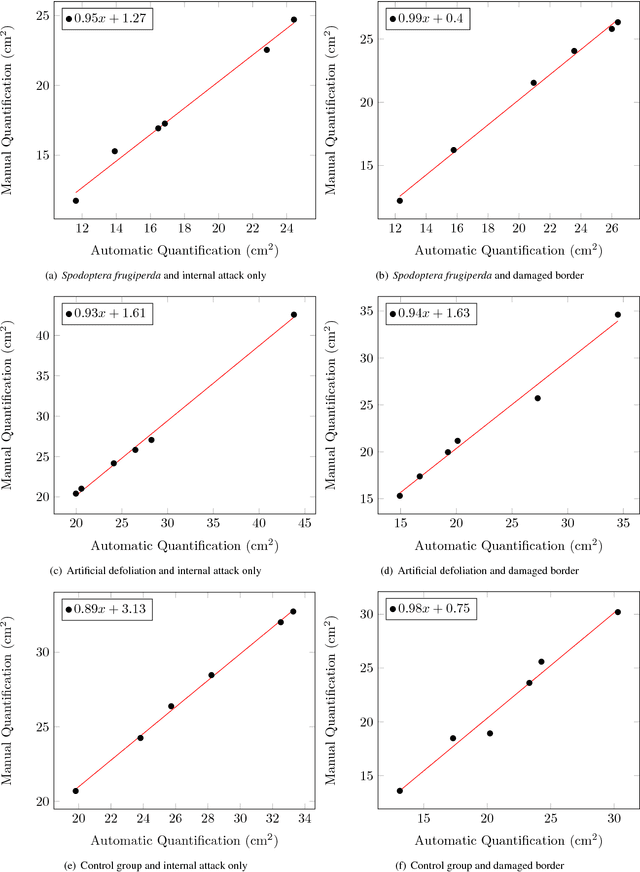
Soybean is one of the ten greatest crops in the world, answering for billion-dollar businesses every year. This crop suffers from insect herbivory that costs millions from producers. Hence, constant monitoring of the crop foliar damage is necessary to guide the application of insecticides. However, current methods to measure foliar damage are expensive and dependent on laboratory facilities, in some cases, depending on complex devices. To cope with these shortcomings, we introduce an image processing methodology to measure the foliar damage in soybean leaves. We developed a non-destructive imaging method based on two techniques, Otsu segmentation and Bezier curves, to estimate the foliar loss in leaves with or without border damage. We instantiate our methodology in a mobile application named BioLeaf, which is freely distributed for smartphone users. We experimented with real-world leaves collected from a soybean crop in Brazil. Our results demonstrated that BioLeaf achieves foliar damage quantification with precision comparable to that of human specialists. With these results, our proposal might assist soybean producers, reducing the time to measure foliar damage, reducing analytical costs, and defining a commodity application that is applicable not only to soy, but also to different crops such as cotton, bean, potato, coffee, and vegetables.