 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSplatt3R: Zero-shot Gaussian Splatting from Uncalibarated Image Pairs
Aug 25, 2024



In this paper, we introduce Splatt3R, a pose-free, feed-forward method for in-the-wild 3D reconstruction and novel view synthesis from stereo pairs. Given uncalibrated natural images, Splatt3R can predict 3D Gaussian Splats without requiring any camera parameters or depth information. For generalizability, we start from a 'foundation' 3D geometry reconstruction method, MASt3R, and extend it to be a full 3D structure and appearance reconstructor. Specifically, unlike the original MASt3R which reconstructs only 3D point clouds, we predict the additional Gaussian attributes required to construct a Gaussian primitive for each point. Hence, unlike other novel view synthesis methods, Splatt3R is first trained by optimizing the 3D point cloud's geometry loss, and then a novel view synthesis objective. By doing this, we avoid the local minima present in training 3D Gaussian Splats from stereo views. We also propose a novel loss masking strategy that we empirically find is critical for strong performance on extrapolated viewpoints. We train Splatt3R on the ScanNet++ dataset and demonstrate excellent generalisation to uncalibrated, in-the-wild images. Splatt3R can reconstruct scenes at 4FPS at 512 x 512 resolution, and the resultant splats can be rendered in real-time.
When LLMs step into the 3D World: A Survey and Meta-Analysis of 3D Tasks via Multi-modal Large Language Models
May 16, 2024



As large language models (LLMs) evolve, their integration with 3D spatial data (3D-LLMs) has seen rapid progress, offering unprecedented capabilities for understanding and interacting with physical spaces. This survey provides a comprehensive overview of the methodologies enabling LLMs to process, understand, and generate 3D data. Highlighting the unique advantages of LLMs, such as in-context learning, step-by-step reasoning, open-vocabulary capabilities, and extensive world knowledge, we underscore their potential to significantly advance spatial comprehension and interaction within embodied Artificial Intelligence (AI) systems. Our investigation spans various 3D data representations, from point clouds to Neural Radiance Fields (NeRFs). It examines their integration with LLMs for tasks such as 3D scene understanding, captioning, question-answering, and dialogue, as well as LLM-based agents for spatial reasoning, planning, and navigation. The paper also includes a brief review of other methods that integrate 3D and language. The meta-analysis presented in this paper reveals significant progress yet underscores the necessity for novel approaches to harness the full potential of 3D-LLMs. Hence, with this paper, we aim to chart a course for future research that explores and expands the capabilities of 3D-LLMs in understanding and interacting with the complex 3D world. To support this survey, we have established a project page where papers related to our topic are organized and listed: https://github.com/ActiveVisionLab/Awesome-LLM-3D.
Bootstrapping the Relationship Between Images and Their Clean and Noisy Labels
Oct 17, 2022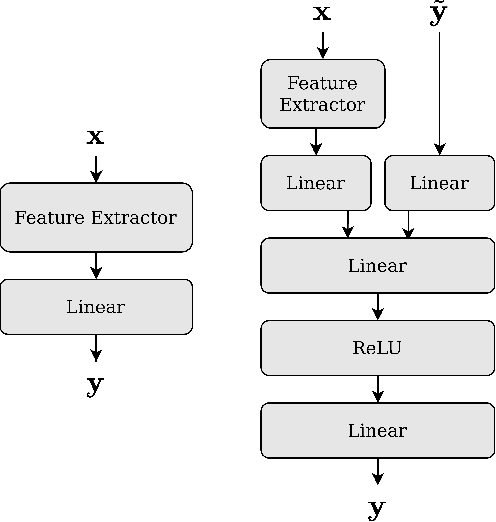
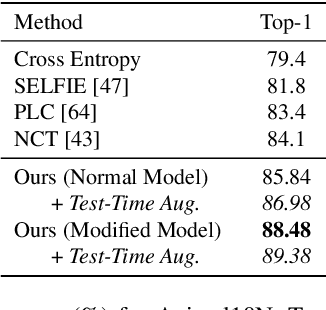
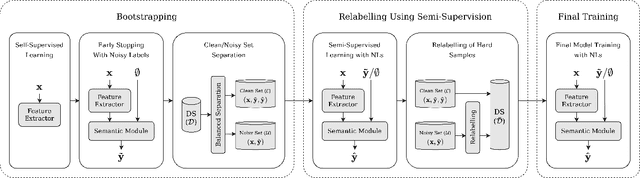
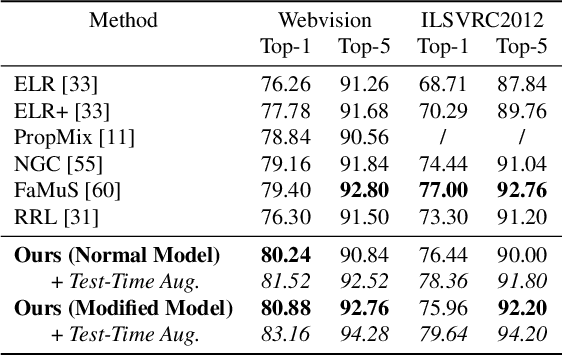
Many state-of-the-art noisy-label learning methods rely on learning mechanisms that estimate the samples' clean labels during training and discard their original noisy labels. However, this approach prevents the learning of the relationship between images, noisy labels and clean labels, which has been shown to be useful when dealing with instance-dependent label noise problems. Furthermore, methods that do aim to learn this relationship require cleanly annotated subsets of data, as well as distillation or multi-faceted models for training. In this paper, we propose a new training algorithm that relies on a simple model to learn the relationship between clean and noisy labels without the need for a cleanly labelled subset of data. Our algorithm follows a 3-stage process, namely: 1) self-supervised pre-training followed by an early-stopping training of the classifier to confidently predict clean labels for a subset of the training set; 2) use the clean set from stage (1) to bootstrap the relationship between images, noisy labels and clean labels, which we exploit for effective relabelling of the remaining training set using semi-supervised learning; and 3) supervised training of the classifier with all relabelled samples from stage (2). By learning this relationship, we achieve state-of-the-art performance in asymmetric and instance-dependent label noise problems.
Robotic Vision for Space Mining
Sep 30, 2021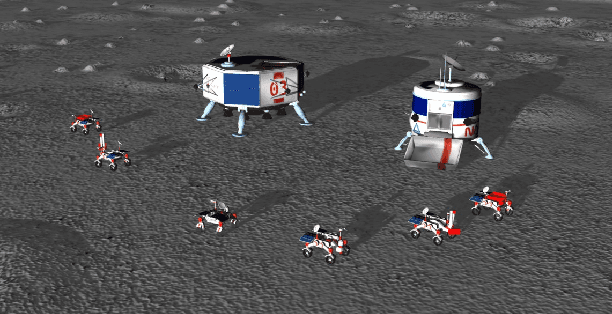
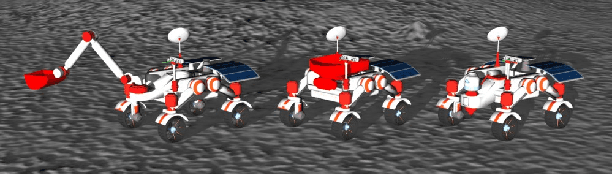
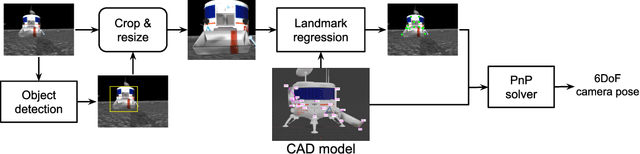
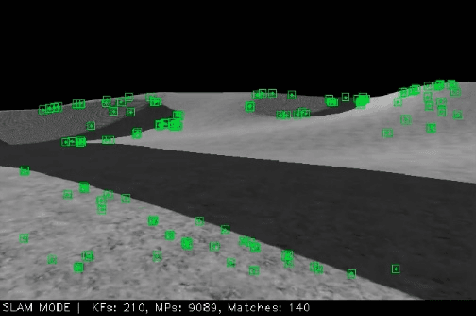
Future Moon bases will likely be constructed using resources mined from the surface of the Moon. The difficulty of maintaining a human workforce on the Moon and communications lag with Earth means that mining will need to be conducted using collaborative robots with a high degree of autonomy. In this paper, we explore the utility of robotic vision towards addressing several major challenges in autonomous mining in the lunar environment: lack of satellite positioning systems, navigation in hazardous terrain, and delicate robot interactions. Specifically, we describe and report the results of robotic vision algorithms that we developed for Phase 2 of the NASA Space Robotics Challenge, which was framed in the context of autonomous collaborative robots for mining on the Moon. The competition provided a simulated lunar environment that exhibits the complexities alluded to above. We show how machine learning-enabled vision could help alleviate the challenges posed by the lunar environment. A robust multi-robot coordinator was also developed to achieve long-term operation and effective collaboration between robots.