 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Agents That Reason About Their Computation
Oct 26, 2025While reinforcement learning agents can achieve superhuman performance in many complex tasks, they typically do not become more computationally efficient as they improve. In contrast, humans gradually require less cognitive effort as they become more proficient at a task. If agents could reason about their compute as they learn, could they similarly reduce their computation footprint? If they could, we could have more energy efficient agents or free up compute cycles for other processes like planning. In this paper, we experiment with showing agents the cost of their computation and giving them the ability to control when they use compute. We conduct our experiments on the Arcade Learning Environment, and our results demonstrate that with the same training compute budget, agents that reason about their compute perform better on 75% of games. Furthermore, these agents use three times less compute on average. We analyze individual games and show where agents gain these efficiencies.
Robotic Vision for Space Mining
Sep 30, 2021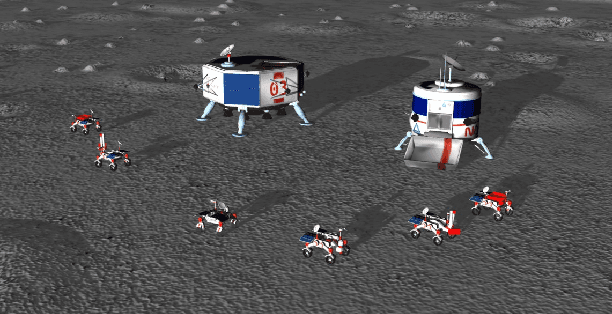
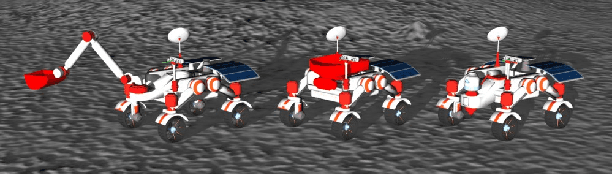
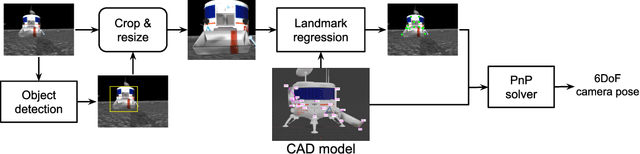
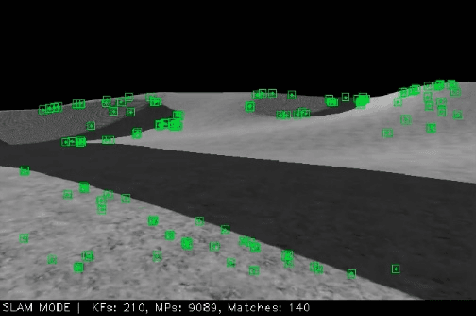
Future Moon bases will likely be constructed using resources mined from the surface of the Moon. The difficulty of maintaining a human workforce on the Moon and communications lag with Earth means that mining will need to be conducted using collaborative robots with a high degree of autonomy. In this paper, we explore the utility of robotic vision towards addressing several major challenges in autonomous mining in the lunar environment: lack of satellite positioning systems, navigation in hazardous terrain, and delicate robot interactions. Specifically, we describe and report the results of robotic vision algorithms that we developed for Phase 2 of the NASA Space Robotics Challenge, which was framed in the context of autonomous collaborative robots for mining on the Moon. The competition provided a simulated lunar environment that exhibits the complexities alluded to above. We show how machine learning-enabled vision could help alleviate the challenges posed by the lunar environment. A robust multi-robot coordinator was also developed to achieve long-term operation and effective collaboration between robots.