 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMSGFusion: Multimodal Scene Graph-Guided Infrared and Visible Image Fusion
Sep 16, 2025



Infrared and visible image fusion has garnered considerable attention owing to the strong complementarity of these two modalities in complex, harsh environments. While deep learning-based fusion methods have made remarkable advances in feature extraction, alignment, fusion, and reconstruction, they still depend largely on low-level visual cues, such as texture and contrast, and struggle to capture the high-level semantic information embedded in images. Recent attempts to incorporate text as a source of semantic guidance have relied on unstructured descriptions that neither explicitly model entities, attributes, and relationships nor provide spatial localization, thereby limiting fine-grained fusion performance. To overcome these challenges, we introduce MSGFusion, a multimodal scene graph-guided fusion framework for infrared and visible imagery. By deeply coupling structured scene graphs derived from text and vision, MSGFusion explicitly represents entities, attributes, and spatial relations, and then synchronously refines high-level semantics and low-level details through successive modules for scene graph representation, hierarchical aggregation, and graph-driven fusion. Extensive experiments on multiple public benchmarks show that MSGFusion significantly outperforms state-of-the-art approaches, particularly in detail preservation and structural clarity, and delivers superior semantic consistency and generalizability in downstream tasks such as low-light object detection, semantic segmentation, and medical image fusion.
High-speed multiwavelength photonic temporal integration using silicon photonics
May 07, 2025Optical systems have been pivotal for energy-efficient computing, performing high-speed, parallel operations in low-loss carriers. While these predominantly analog optical accelerators bypass digitization to perform parallel floating-point computations, scaling optical hardware to map large-vector sizes for AI tasks remains challenging. Here, we overcome this limitation by unfolding scalar operations in time and introducing a photonic-heater-in-lightpath (PHIL) unit for all-optical temporal integration. Counterintuitively, we exploit a slow heat dissipation process to integrate optical signals modulated at 50 GHz bridging the speed gap between the widely applied thermo-optic effects and ultrafast photonics. This architecture supports optical end-to-end signal processing, eliminates inefficient electro-optical conversions, and enables both linear and nonlinear operations within a unified framework. Our results demonstrate a scalable path towards high-speed photonic computing through thermally driven integration.
Multi-Agent Path Planning based on MPC and DDPG
Feb 26, 2021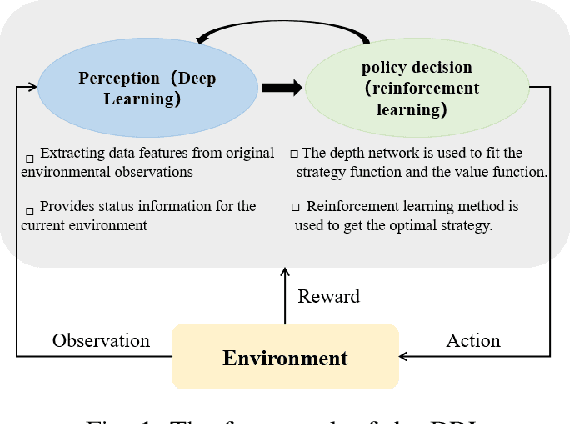
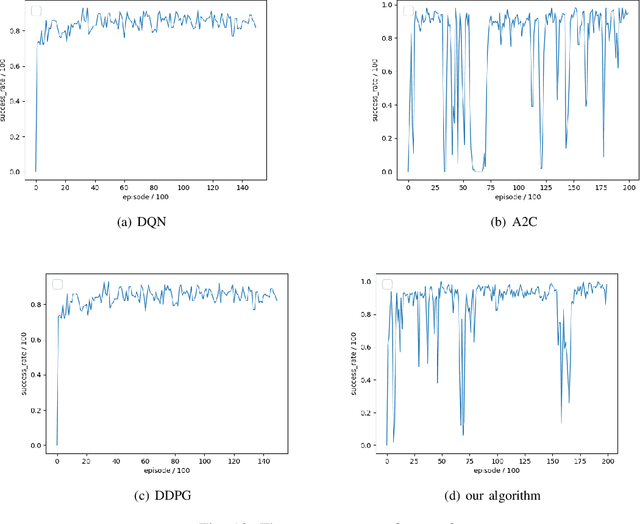
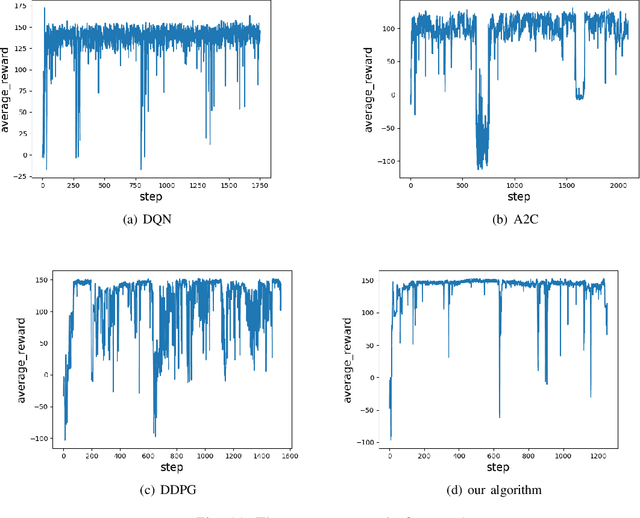
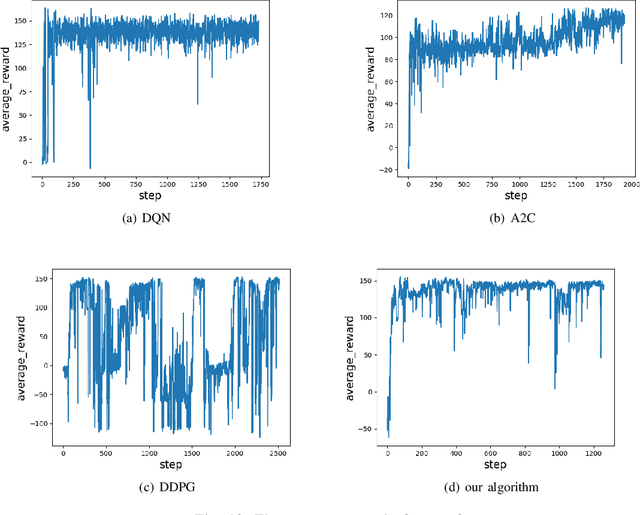
The problem of mixed static and dynamic obstacle avoidance is essential for path planning in highly dynamic environment. However, the paths formed by grid edges can be longer than the true shortest paths in the terrain since their headings are artificially constrained. Existing methods can hardly deal with dynamic obstacles. To address this problem, we propose a new algorithm combining Model Predictive Control (MPC) with Deep Deterministic Policy Gradient (DDPG). Firstly, we apply the MPC algorithm to predict the trajectory of dynamic obstacles. Secondly, the DDPG with continuous action space is designed to provide learning and autonomous decision-making capability for robots. Finally, we introduce the idea of the Artificial Potential Field to set the reward function to improve convergence speed and accuracy. We employ Unity 3D to perform simulation experiments in highly uncertain environment such as aircraft carrier decks and squares. The results show that our method has made great improvement on accuracy by 7%-30% compared with the other methods, and on the length of the path and turning angle by reducing 100 units and 400-450 degrees compared with DQN (Deep Q Network), respectively.