 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCubifyGS: Object-Centric 3D Gaussian Splatting for Lifelong Dynamic Scene Maintenance
Jun 27, 2026Lifelong scene mapping under rigid object rearrangement remains a fundamental challenge in robotics. While 3D Gaussian Splatting (3DGS) enables high-fidelity modeling, primitive-level updates often cause persistent ghosting and slow recovery. We propose CubifyGS, an object-level mapping framework that shifts dynamic maintenance from passive re-optimization to active asset management. CubifyGS models movable instances as reusable Gaussian assets, detects object appearance and disappearance, and updates maps through asset retrieval, rigid transformation, and explicit pruning rather than reconstruction from scratch. To address geometric voids and local photometric mismatch after such edits, we further propose an event-triggered adaptive optimization strategy that focuses computation on affected regions. We validate our approach on a newly constructed high-fidelity dynamic benchmark, demonstrating that CubifyGS improves artifact suppression and maintenance efficiency over representative reproducible baselines in the evaluated object-rearrangement setting.
Automated 3D-GS Registration and Fusion via Skeleton Alignment and Gaussian-Adaptive Features
Jul 28, 2025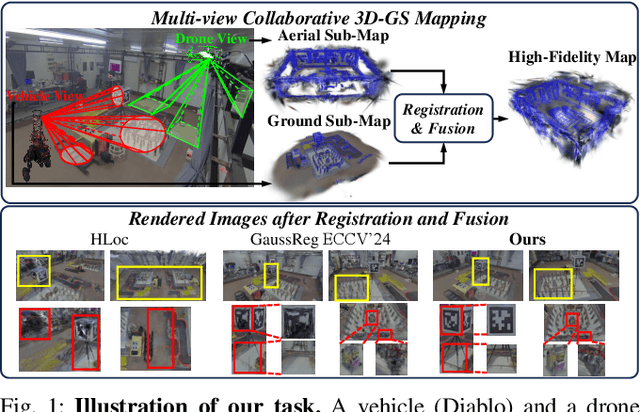
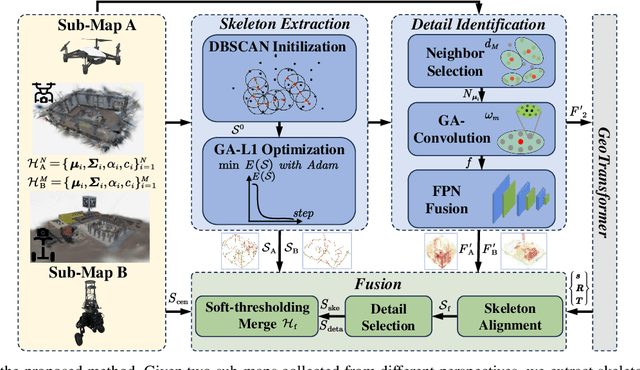
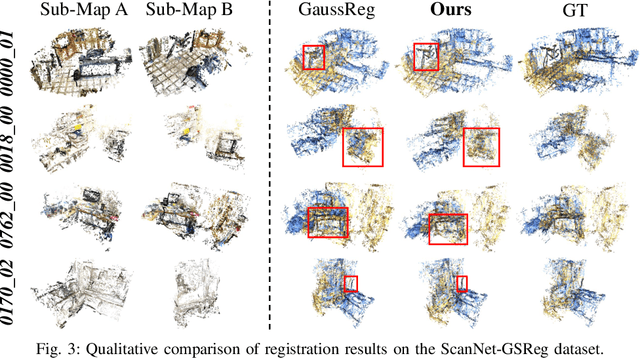
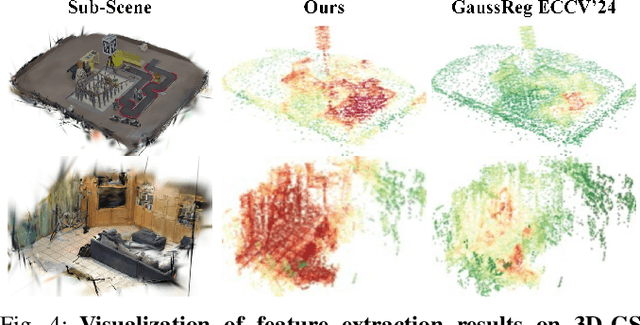
In recent years, 3D Gaussian Splatting (3D-GS)-based scene representation demonstrates significant potential in real-time rendering and training efficiency. However, most existing methods primarily focus on single-map reconstruction, while the registration and fusion of multiple 3D-GS sub-maps remain underexplored. Existing methods typically rely on manual intervention to select a reference sub-map as a template and use point cloud matching for registration. Moreover, hard-threshold filtering of 3D-GS primitives often degrades rendering quality after fusion. In this paper, we present a novel approach for automated 3D-GS sub-map alignment and fusion, eliminating the need for manual intervention while enhancing registration accuracy and fusion quality. First, we extract geometric skeletons across multiple scenes and leverage ellipsoid-aware convolution to capture 3D-GS attributes, facilitating robust scene registration. Second, we introduce a multi-factor Gaussian fusion strategy to mitigate the scene element loss caused by rigid thresholding. Experiments on the ScanNet-GSReg and our Coord datasets demonstrate the effectiveness of the proposed method in registration and fusion. For registration, it achieves a 41.9\% reduction in RRE on complex scenes, ensuring more precise pose estimation. For fusion, it improves PSNR by 10.11 dB, highlighting superior structural preservation. These results confirm its ability to enhance scene alignment and reconstruction fidelity, ensuring more consistent and accurate 3D scene representation for robotic perception and autonomous navigation.