 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePDE foundation models are skillful AI weather emulators for the Martian atmosphere
Feb 16, 2026We show that AI foundation models that are pretrained on numerical solutions to a diverse corpus of partial differential equations can be adapted and fine-tuned to obtain skillful predictive weather emulators for the Martian atmosphere. We base our work on the Poseidon PDE foundation model for two-dimensional systems. We develop a method to extend Poseidon from two to three dimensions while keeping the pretraining information. Moreover, we investigate the performance of the model in the presence of sparse initial conditions. Our results make use of four Martian years (approx.~34 GB) of training data and a median compute budget of 13 GPU hours. We find that the combination of pretraining and model extension yields a performance increase of 34.4\% on a held-out year. This shows that PDEs-FMs can not only approximate solutions to (other) PDEs but also anchor models for real-world problems with complex interactions that lack a sufficient amount of training data or a suitable compute budget.
Certified Adversarial Robustness for Deep Reinforcement Learning
Apr 11, 2020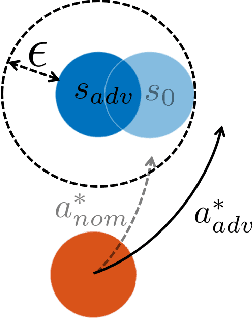
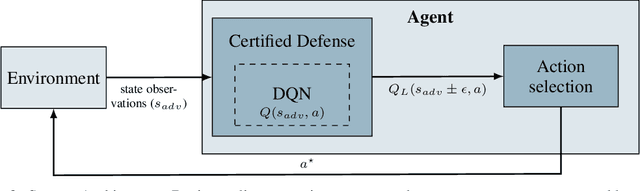
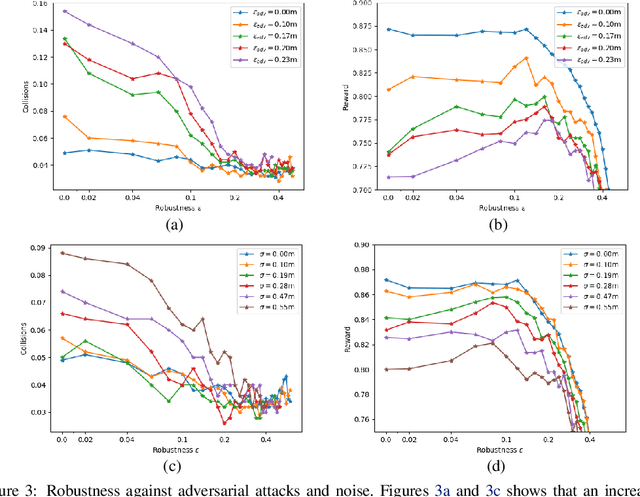
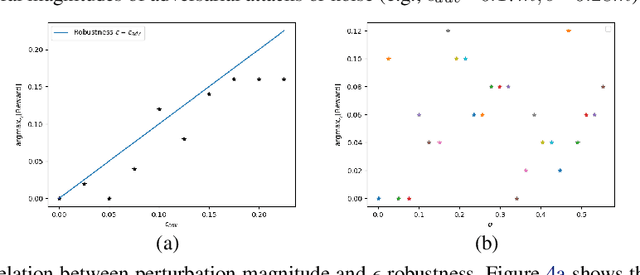
Deep Neural Network-based systems are now the state-of-the-art in many robotics tasks, but their application in safety-critical domains remains dangerous without formal guarantees on network robustness. Small perturbations to sensor inputs (from noise or adversarial examples) are often enough to change network-based decisions, which was recently shown to cause an autonomous vehicle to swerve into another lane. In light of these dangers, numerous algorithms have been developed as defensive mechanisms from these adversarial inputs, some of which provide formal robustness guarantees or certificates. This work leverages research on certified adversarial robustness to develop an online certified defense for deep reinforcement learning algorithms. The proposed defense computes guaranteed lower bounds on state-action values during execution to identify and choose a robust action under a worst-case deviation in input space due to possible adversaries or noise. The approach is demonstrated on a Deep Q-Network policy and is shown to increase robustness to noise and adversaries in pedestrian collision avoidance scenarios and a classic control task. This work extends our previous paper with new performance guarantees, expanded results aggregated across more scenarios, an extension into scenarios with adversarial behavior, comparisons with a more computationally expensive method, and visualizations that provide intuition about the robustness algorithm.