 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDownlink Performance Analysis of Pinching Antenna Systems: WDMA or NOMA?
May 14, 2026This paper presents an analytical framework for downlink pinching antenna systems (PASS) employing waveguide division multiple access (WDMA) and non-orthogonal multiple access (NOMA). A unified channel model is developed to capture antenna deployment, user spatial distribution, and path loss. Closed-form and single-integral expressions for the outage probability and average achievable rate are derived and validated via Monte Carlo simulations. The results show that NOMA achieves higher spectral efficiency at high transmit signal-to-noise ratio (SNR) due to successive interference cancellation (SIC), whereas WDMA offers more reliable performance at low to moderate SNR but suffers from an outage floor and rate saturation at high SNR. Moreover, WDMA performance is more sensitive to the user spatial distribution due to the spatially dependent inter-waveguide interference. These findings provide design insights for access-scheme selection and antenna placement in PASS.
Hybrid Pinching-Fluid Antenna Assisted Wireless Communications: Modeling and Performance Analysis
May 07, 2026Reconfigurable-antenna systems have received increasing attention for their ability to adapt wireless channels. However, existing architectures exhibit scenario-dependent limitations: fluid antennas provide strong diversity gains in rich-scattering environments but offer limited benefits under line-of-sight (LoS)-dominant conditions, while pinching antennas can effectively reduce path loss by adjusting the radiation point along a waveguide, yet perform poorly in severe non-LoS (NLoS) scenarios. This letter proposes a hybrid pinching-fluid antenna system (HPFAS), where pinching antenna (PA) is employed at the transmitter and a fluid antenna (FA) is used at the receiver to jointly exploit LoS enhancement and spatial diversity. A tractable channel model is developed, and outage probability expressions are derived for both single-user and multi-user scenarios. Simulation results validate the analysis and show that the proposed HPFAS consistently outperforms systems using only pinching antennas or only fluid antennas under various propagation conditions.
Latent Variable Models in the Era of Industrial Big Data: Extension and Beyond
Aug 23, 2022
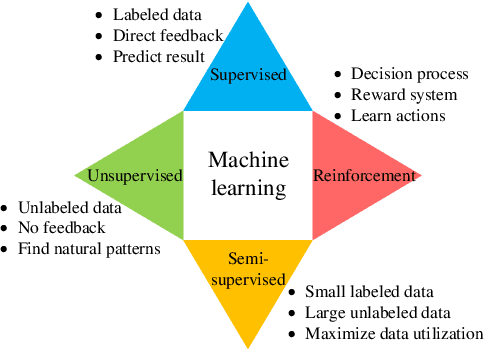
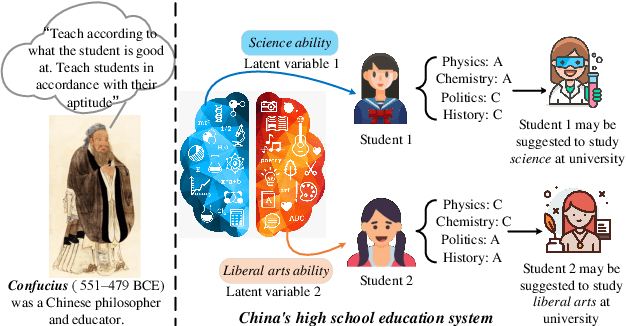
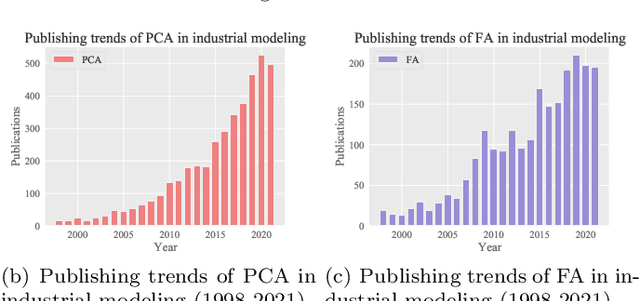
A rich supply of data and innovative algorithms have made data-driven modeling a popular technique in modern industry. Among various data-driven methods, latent variable models (LVMs) and their counterparts account for a major share and play a vital role in many industrial modeling areas. LVM can be generally divided into statistical learning-based classic LVM and neural networks-based deep LVM (DLVM). We first discuss the definitions, theories and applications of classic LVMs in detail, which serves as both a comprehensive tutorial and a brief application survey on classic LVMs. Then we present a thorough introduction to current mainstream DLVMs with emphasis on their theories and model architectures, soon afterwards provide a detailed survey on industrial applications of DLVMs. The aforementioned two types of LVM have obvious advantages and disadvantages. Specifically, classic LVMs have concise principles and good interpretability, but their model capacity cannot address complicated tasks. Neural networks-based DLVMs have sufficient model capacity to achieve satisfactory performance in complex scenarios, but it comes at sacrifices in model interpretability and efficiency. Aiming at combining the virtues and mitigating the drawbacks of these two types of LVMs, as well as exploring non-neural-network manners to build deep models, we propose a novel concept called lightweight deep LVM (LDLVM). After proposing this new idea, the article first elaborates the motivation and connotation of LDLVM, then provides two novel LDLVMs, along with thorough descriptions on their principles, architectures and merits. Finally, outlooks and opportunities are discussed, including important open questions and possible research directions.
A Data-Driven Approach for Autonomous Motion Planning and Control in Off-Road Driving Scenarios
May 25, 2018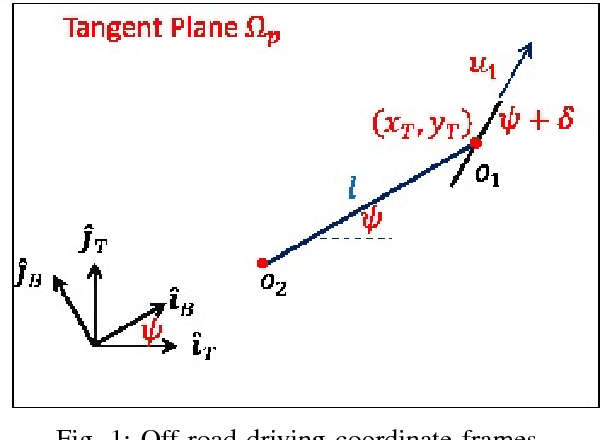
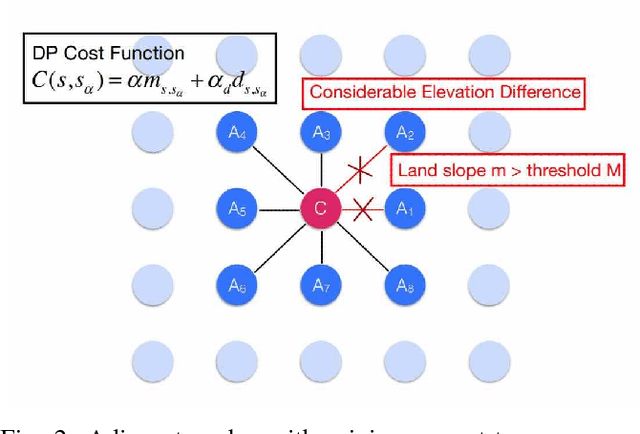
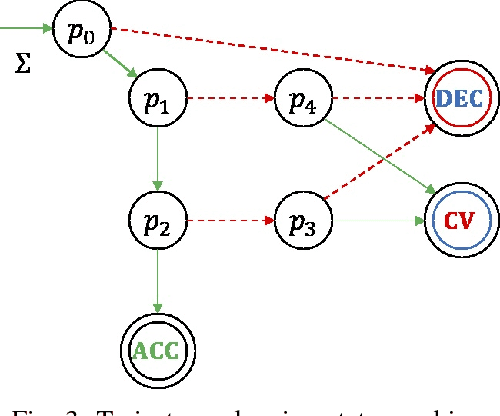
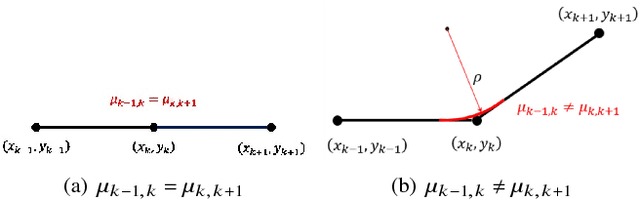
This paper presents a novel data-driven approach to vehicle motion planning and control in off-road driving scenarios. For autonomous off-road driving, environmental conditions impact terrain traversability as a function of weather, surface composition, and slope. Geographical information system (GIS) and National Centers for Environmental Information datasets are processed to provide this information for interactive planning and control system elements. A top-level global route planner (GRP) defines optimal waypoints using dynamic programming (DP). A local path planner (LPP) computes a desired trajectory between waypoints such that infeasible control states and collisions with obstacles are avoided. The LPP also updates the GRP with real-time sensing and control data. A low-level feedback controller applies feedback linearization to asymptotically track the specified LPP trajectory. Autonomous driving simulation results are presented for traversal of terrains in Oregon and Indiana case studies.