 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatial Reasoning is Not a Free Lunch: A Controlled Study on LLaVA
Mar 13, 2026Vision-language models (VLMs) have advanced rapidly, yet they still struggle with basic spatial reasoning. Despite strong performance on general benchmarks, modern VLMs remain brittle at understanding 2D spatial relationships such as relative position, layout, and counting. We argue that this failure is not merely a data problem, but is closely tied to dominant design choices in current VLM pipelines: reliance on CLIP-style image encoders and the flattening of images into 1D token sequences with 1D positional encoding. We present a controlled diagnostic study within the LLaVA framework to isolate how these choices affect spatial grounding. We evaluate frontier models and LLaVA variants on a suite of spatial benchmarks, comparing CLIP-based encoders against alternatives trained with denser or generative objectives, as well as variants augmented with 2D positional encoding. Our results show consistent spatial performance gaps across models, and indicate that encoder objectives and positional structure shape spatial behavior, but do not fully resolve it.
The Spatial Blindspot of Vision-Language Models
Jan 15, 2026Vision-language models (VLMs) have advanced rapidly, but their ability to capture spatial relationships remains a blindspot. Current VLMs are typically built with contrastive language-image pretraining (CLIP) style image encoders. The training recipe often flattens images into 1D patch sequences, discarding the 2D structure necessary for spatial reasoning. We argue that this lack of spatial awareness is a missing dimension in VLM design and a bottleneck for applications requiring spatial grounding, such as robotics and embodied AI. To address this, we investigate (i) image encoders trained with alternative objectives and (ii) 2D positional encodings. Our experiments show that these architectural choices can lead to improved spatial reasoning on several benchmarks.
Behind Maya: Building a Multilingual Vision Language Model
May 15, 2025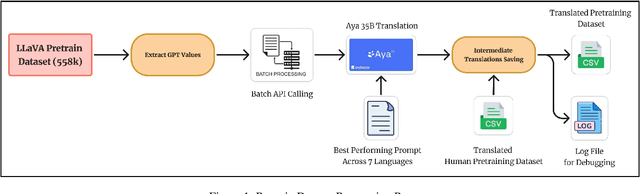
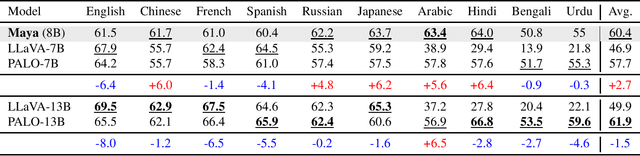

In recent times, we have seen a rapid development of large Vision-Language Models (VLMs). They have shown impressive results on academic benchmarks, primarily in widely spoken languages but lack performance on low-resource languages and varied cultural contexts. To address these limitations, we introduce Maya, an open-source Multilingual VLM. Our contributions are: 1) a multilingual image-text pretraining dataset in eight languages, based on the LLaVA pretraining dataset; and 2) a multilingual image-text model supporting these languages, enhancing cultural and linguistic comprehension in vision-language tasks. Code available at https://github.com/nahidalam/maya.
Maya: An Instruction Finetuned Multilingual Multimodal Model
Dec 10, 2024



The rapid development of large Vision-Language Models (VLMs) has led to impressive results on academic benchmarks, primarily in widely spoken languages. However, significant gaps remain in the ability of current VLMs to handle low-resource languages and varied cultural contexts, largely due to a lack of high-quality, diverse, and safety-vetted data. Consequently, these models often struggle to understand low-resource languages and cultural nuances in a manner free from toxicity. To address these limitations, we introduce Maya, an open-source Multimodal Multilingual model. Our contributions are threefold: 1) a multilingual image-text pretraining dataset in eight languages, based on the LLaVA pretraining dataset; 2) a thorough analysis of toxicity within the LLaVA dataset, followed by the creation of a novel toxicity-free version across eight languages; and 3) a multilingual image-text model supporting these languages, enhancing cultural and linguistic comprehension in vision-language tasks. Code available at https://github.com/nahidalam/maya.