 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-Based Vision Systems for Semi-Autonomous Forklift Operation in Industrial Warehouse Environments
Nov 09, 2025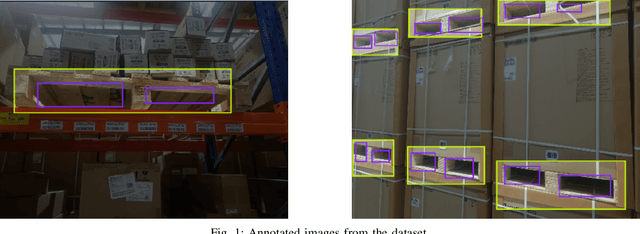
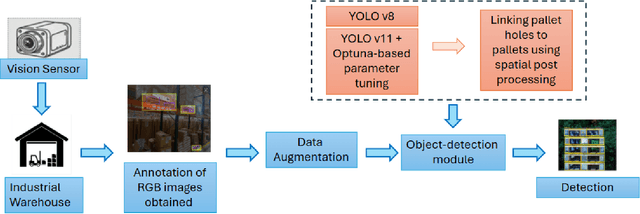
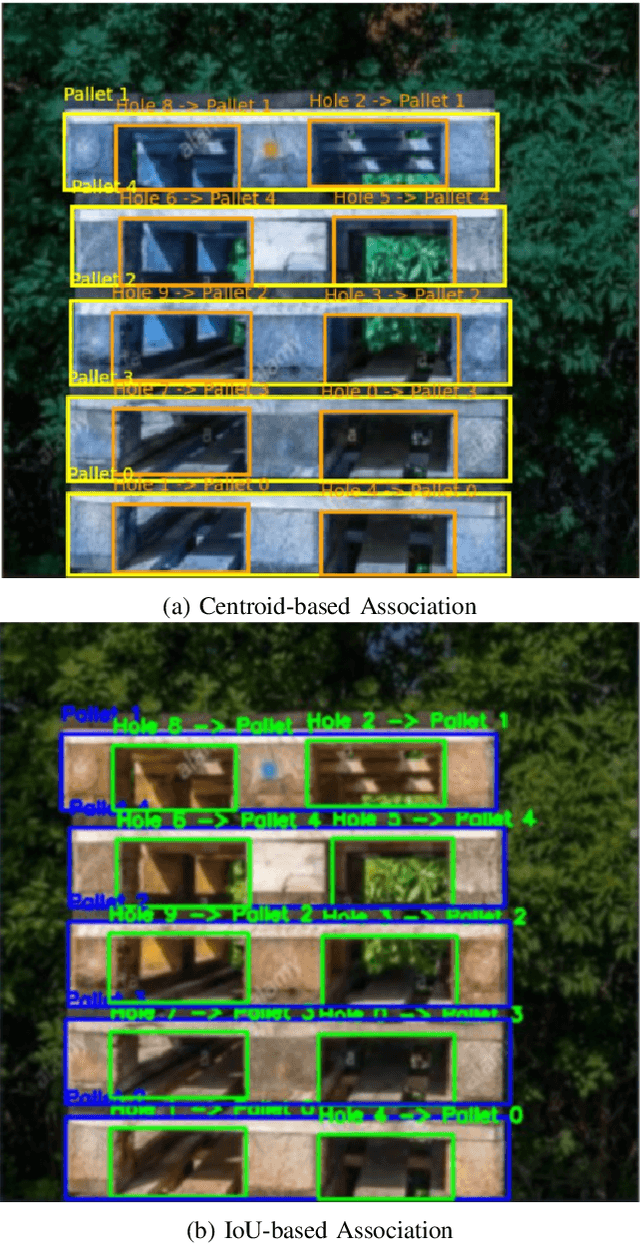
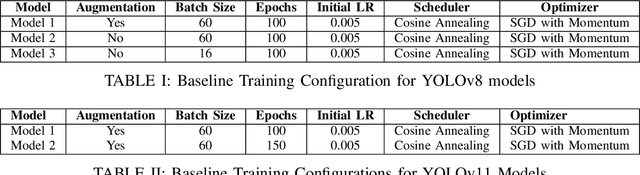
The automation of material handling in warehouses increasingly relies on robust, low cost perception systems for forklifts and Automated Guided Vehicles (AGVs). This work presents a vision based framework for pallet and pallet hole detection and mapping using a single standard camera. We utilized YOLOv8 and YOLOv11 architectures, enhanced through Optuna driven hyperparameter optimization and spatial post processing. An innovative pallet hole mapping module converts the detections into actionable spatial representations, enabling accurate pallet and pallet hole association for forklift operation. Experiments on a custom dataset augmented with real warehouse imagery show that YOLOv8 achieves high pallet and pallet hole detection accuracy, while YOLOv11, particularly under optimized configurations, offers superior precision and stable convergence. The results demonstrate the feasibility of a cost effective, retrofittable visual perception module for forklifts. This study proposes a scalable approach to advancing warehouse automation, promoting safer, economical, and intelligent logistics operations.
Small-Scale Testbeds for Connected and Automated Vehicles and Robot Swarms: Challenges and a Roadmap
Mar 07, 2025This article proposes a roadmap to address the current challenges in small-scale testbeds for Connected and Automated Vehicles (CAVs) and robot swarms. The roadmap is a joint effort of participants in the workshop "1st Workshop on Small-Scale Testbeds for Connected and Automated Vehicles and Robot Swarms," held on June 2 at the IEEE Intelligent Vehicles Symposium (IV) 2024 in Jeju, South Korea. The roadmap contains three parts: 1) enhancing accessibility and diversity, especially for underrepresented communities, 2) sharing best practices for the development and maintenance of testbeds, and 3) connecting testbeds through an abstraction layer to support collaboration. The workshop features eight invited speakers, four contributed papers [1]-[4], and a presentation of a survey paper on testbeds [5]. The survey paper provides an online comparative table of more than 25 testbeds, available at https://bassamlab.github.io/testbeds-survey. The workshop's own website is available at https://cpm-remote.lrt.unibwmuenchen.de/iv24-workshop.