 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShow, Don't Tell: Detecting Novel Objects by Watching Human Videos
Mar 13, 2026How can a robot quickly identify and recognize new objects shown to it during a human demonstration? Existing closed-set object detectors frequently fail at this because the objects are out-of-distribution. While open-set detectors (e.g., VLMs) sometimes succeed, they often require expensive and tedious human-in-the-loop prompt engineering to uniquely recognize novel object instances. In this paper, we present a self-supervised system that eliminates the need for tedious language descriptions and expensive prompt engineering by training a bespoke object detector on an automatically created dataset, supervised by the human demonstration itself. In our approach, "Show, Don't Tell," we show the detector the specific objects of interest during the demonstration, rather than telling the detector about these objects via complex language descriptions. By bypassing language altogether, this paradigm enables us to quickly train bespoke detectors tailored to the relevant objects observed in human task demonstrations. We develop an integrated on-robot system to deploy our "Show, Don't Tell" paradigm of automatic dataset creation and novel object-detection on a real-world robot. Empirical results demonstrate that our pipeline significantly outperforms state-of-the-art detection and recognition methods for manipulated objects, leading to improved task completion for the robot.
An Interleaved Approach to Trait-Based Task Allocation and Scheduling
Aug 05, 2021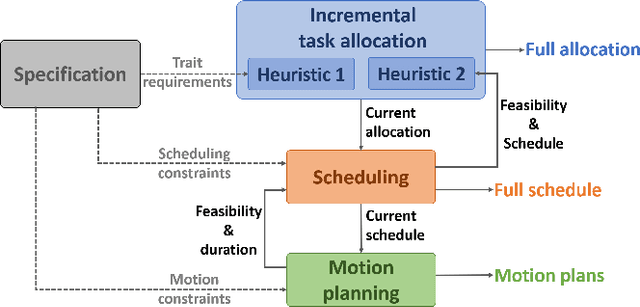
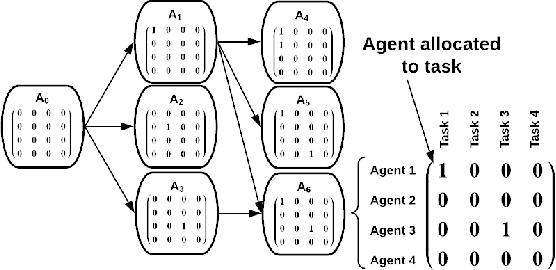
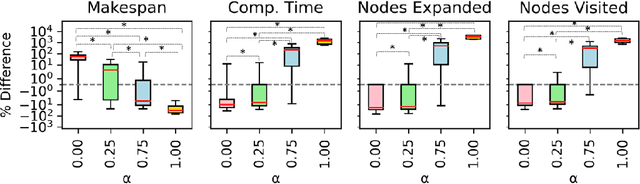
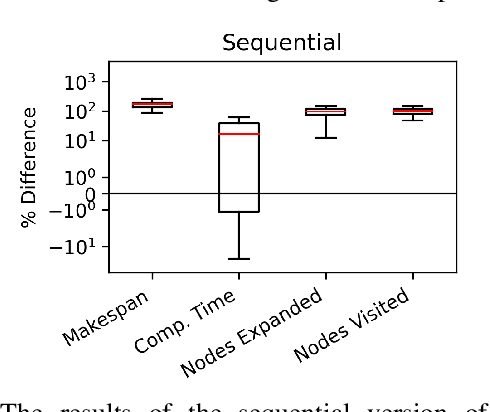
To realize effective heterogeneous multi-robot teams, researchers must leverage individual robots' relative strengths and coordinate their individual behaviors. Specifically, heterogeneous multi-robot systems must answer three important questions: \textit{who} (task allocation), \textit{when} (scheduling), and \textit{how} (motion planning). While specific variants of each of these problems are known to be NP-Hard, their interdependence only exacerbates the challenges involved in solving them together. In this paper, we present a novel framework that interleaves task allocation, scheduling, and motion planning. We introduce a search-based approach for trait-based time-extended task allocation named Incremental Task Allocation Graph Search (ITAGS). In contrast to approaches that solve the three problems in sequence, ITAGS's interleaved approach enables efficient search for allocations while simultaneously satisfying scheduling constraints and accounting for the time taken to execute motion plans. To enable effective interleaving, we develop a convex combination of two search heuristics that optimizes the satisfaction of task requirements as well as the makespan of the associated schedule. We demonstrate the efficacy of ITAGS using detailed ablation studies and comparisons against two state-of-the-art algorithms in a simulated emergency response domain.