 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Methodology to Evaluate Strategies Predicting Rankings on Unseen Domains
May 21, 2025



Frequently, multiple entities (methods, algorithms, procedures, solutions, etc.) can be developed for a common task and applied across various domains that differ in the distribution of scenarios encountered. For example, in computer vision, the input data provided to image analysis methods depend on the type of sensor used, its location, and the scene content. However, a crucial difficulty remains: can we predict which entities will perform best in a new domain based on assessments on known domains, without having to carry out new and costly evaluations? This paper presents an original methodology to address this question, in a leave-one-domain-out fashion, for various application-specific preferences. We illustrate its use with 30 strategies to predict the rankings of 40 entities (unsupervised background subtraction methods) on 53 domains (videos).
Foundations of the Theory of Performance-Based Ranking
Dec 05, 2024

Ranking entities such as algorithms, devices, methods, or models based on their performances, while accounting for application-specific preferences, is a challenge. To address this challenge, we establish the foundations of a universal theory for performance-based ranking. First, we introduce a rigorous framework built on top of both the probability and order theories. Our new framework encompasses the elements necessary to (1) manipulate performances as mathematical objects, (2) express which performances are worse than or equivalent to others, (3) model tasks through a variable called satisfaction, (4) consider properties of the evaluation, (5) define scores, and (6) specify application-specific preferences through a variable called importance. On top of this framework, we propose the first axiomatic definition of performance orderings and performance-based rankings. Then, we introduce a universal parametric family of scores, called ranking scores, that can be used to establish rankings satisfying our axioms, while considering application-specific preferences. Finally, we show, in the case of two-class classification, that the family of ranking scores encompasses well-known performance scores, including the accuracy, the true positive rate (recall, sensitivity), the true negative rate (specificity), the positive predictive value (precision), and F1. However, we also show that some other scores commonly used to compare classifiers are unsuitable to derive performance orderings satisfying the axioms. Therefore, this paper provides the computer vision and machine learning communities with a rigorous framework for evaluating and ranking entities.
A Hitchhiker's Guide to Understanding Performances of Two-Class Classifiers
Dec 05, 2024Properly understanding the performances of classifiers is essential in various scenarios. However, the literature often relies only on one or two standard scores to compare classifiers, which fails to capture the nuances of application-specific requirements, potentially leading to suboptimal classifier selection. Recently, a paper on the foundations of the theory of performance-based ranking introduced a tool, called the Tile, that organizes an infinity of ranking scores into a 2D map. Thanks to the Tile, it is now possible to evaluate and compare classifiers efficiently, displaying all possible application-specific preferences instead of having to rely on a pair of scores. In this paper, we provide a first hitchhiker's guide for understanding the performances of two-class classifiers by presenting four scenarios, each showcasing a different user profile: a theoretical analyst, a method designer, a benchmarker, and an application developer. Particularly, we show that we can provide different interpretative flavors that are adapted to the user's needs by mapping different values on the Tile. As an illustration, we leverage the newly introduced Tile tool and the different flavors to rank and analyze the performances of 74 state-of-the-art semantic segmentation models in two-class classification through the eyes of the four user profiles. Through these user profiles, we demonstrate that the Tile effectively captures the behavior of classifiers in a single visualization, while accommodating an infinite number of ranking scores.
The Tile: A 2D Map of Ranking Scores for Two-Class Classification
Dec 05, 2024



In the computer vision and machine learning communities, as well as in many other research domains, rigorous evaluation of any new method, including classifiers, is essential. One key component of the evaluation process is the ability to compare and rank methods. However, ranking classifiers and accurately comparing their performances, especially when taking application-specific preferences into account, remains challenging. For instance, commonly used evaluation tools like Receiver Operating Characteristic (ROC) and Precision/Recall (PR) spaces display performances based on two scores. Hence, they are inherently limited in their ability to compare classifiers across a broader range of scores and lack the capability to establish a clear ranking among classifiers. In this paper, we present a novel versatile tool, named the Tile, that organizes an infinity of ranking scores in a single 2D map for two-class classifiers, including common evaluation scores such as the accuracy, the true positive rate, the positive predictive value, Jaccard's coefficient, and all F-beta scores. Furthermore, we study the properties of the underlying ranking scores, such as the influence of the priors or the correspondences with the ROC space, and depict how to characterize any other score by comparing them to the Tile. Overall, we demonstrate that the Tile is a powerful tool that effectively captures all the rankings in a single visualization and allows interpreting them.
Physically Interpretable Probabilistic Domain Characterization
Nov 22, 2024Characterizing domains is essential for models analyzing dynamic environments, as it allows them to adapt to evolving conditions or to hand the task over to backup systems when facing conditions outside their operational domain. Existing solutions typically characterize a domain by solving a regression or classification problem, which limits their applicability as they only provide a limited summarized description of the domain. In this paper, we present a novel approach to domain characterization by characterizing domains as probability distributions. Particularly, we develop a method to predict the likelihood of different weather conditions from images captured by vehicle-mounted cameras by estimating distributions of physical parameters using normalizing flows. To validate our proposed approach, we conduct experiments within the context of autonomous vehicles, focusing on predicting the distribution of weather parameters to characterize the operational domain. This domain is characterized by physical parameters (absolute characterization) and arbitrarily predefined domains (relative characterization). Finally, we evaluate whether a system can safely operate in a target domain by comparing it to multiple source domains where safety has already been established. This approach holds significant potential, as accurate weather prediction and effective domain adaptation are crucial for autonomous systems to adjust to dynamic environmental conditions.
Multi-Stream Cellular Test-Time Adaptation of Real-Time Models Evolving in Dynamic Environments
Apr 27, 2024In the era of the Internet of Things (IoT), objects connect through a dynamic network, empowered by technologies like 5G, enabling real-time data sharing. However, smart objects, notably autonomous vehicles, face challenges in critical local computations due to limited resources. Lightweight AI models offer a solution but struggle with diverse data distributions. To address this limitation, we propose a novel Multi-Stream Cellular Test-Time Adaptation (MSC-TTA) setup where models adapt on the fly to a dynamic environment divided into cells. Then, we propose a real-time adaptive student-teacher method that leverages the multiple streams available in each cell to quickly adapt to changing data distributions. We validate our methodology in the context of autonomous vehicles navigating across cells defined based on location and weather conditions. To facilitate future benchmarking, we release a new multi-stream large-scale synthetic semantic segmentation dataset, called DADE, and show that our multi-stream approach outperforms a single-stream baseline. We believe that our work will open research opportunities in the IoT and 5G eras, offering solutions for real-time model adaptation.
Online Distillation with Continual Learning for Cyclic Domain Shifts
Apr 03, 2023



In recent years, online distillation has emerged as a powerful technique for adapting real-time deep neural networks on the fly using a slow, but accurate teacher model. However, a major challenge in online distillation is catastrophic forgetting when the domain shifts, which occurs when the student model is updated with data from the new domain and forgets previously learned knowledge. In this paper, we propose a solution to this issue by leveraging the power of continual learning methods to reduce the impact of domain shifts. Specifically, we integrate several state-of-the-art continual learning methods in the context of online distillation and demonstrate their effectiveness in reducing catastrophic forgetting. Furthermore, we provide a detailed analysis of our proposed solution in the case of cyclic domain shifts. Our experimental results demonstrate the efficacy of our approach in improving the robustness and accuracy of online distillation, with potential applications in domains such as video surveillance or autonomous driving. Overall, our work represents an important step forward in the field of online distillation and continual learning, with the potential to significantly impact real-world applications.
Mixture Domain Adaptation to Improve Semantic Segmentation in Real-World Surveillance
Nov 18, 2022Various tasks encountered in real-world surveillance can be addressed by determining posteriors (e.g. by Bayesian inference or machine learning), based on which critical decisions must be taken. However, the surveillance domain (acquisition device, operating conditions, etc.) is often unknown, which prevents any possibility of scene-specific optimization. In this paper, we define a probabilistic framework and present a formal proof of an algorithm for the unsupervised many-to-infinity domain adaptation of posteriors. Our proposed algorithm is applicable when the probability measure associated with the target domain is a convex combination of the probability measures of the source domains. It makes use of source models and a domain discriminator model trained off-line to compute posteriors adapted on the fly to the target domain. Finally, we show the effectiveness of our algorithm for the task of semantic segmentation in real-world surveillance. The code is publicly available at https://github.com/rvandeghen/MDA.
Survey and synthesis of state of the art in driver monitoring
Oct 01, 2021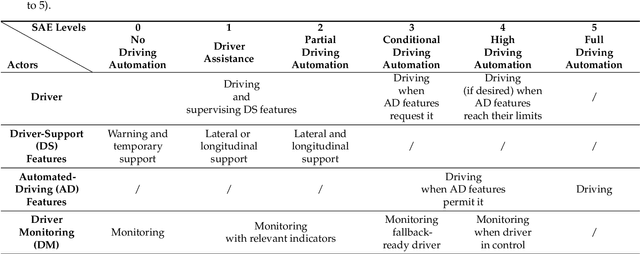
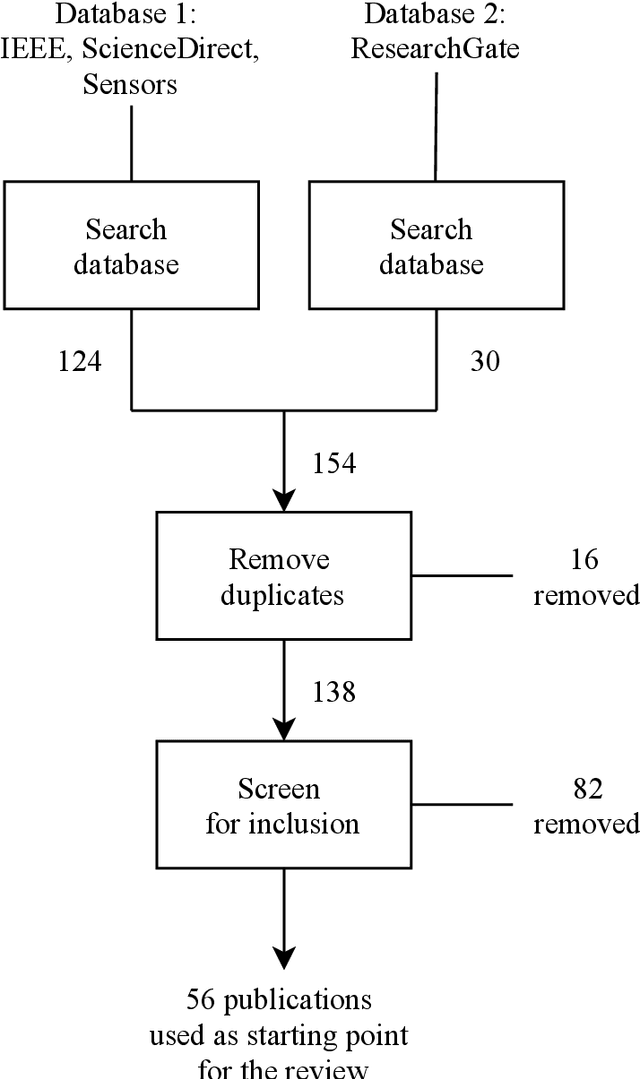
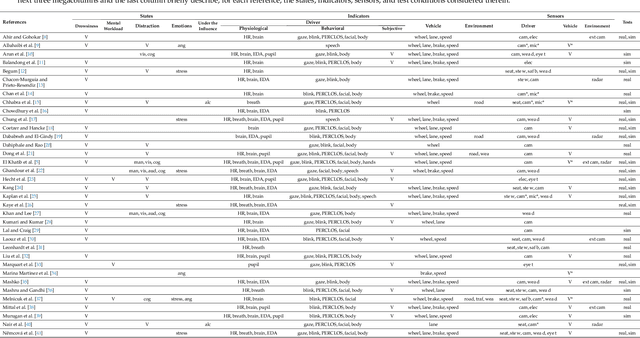
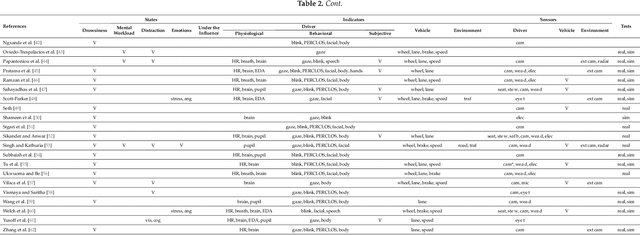
Road-vehicle accidents are mostly due to human errors, and many such accidents could be avoided by continuously monitoring the driver. Driver monitoring (DM) is a topic of growing interest in the automotive industry, and it will remain relevant for all vehicles that are not fully autonomous, and thus for decades for the average vehicle owner. The present paper focuses on the first step of DM, which consists in characterizing the state of the driver. Since DM will be increasingly linked to driving automation (DA), this paper presents a clear view of the role of DM at each of the six SAE levels of DA. This paper surveys the state of the art of DM, and then synthesizes it, providing a unique, structured, polychotomous view of the many characterization techniques of DM. Informed by the survey, the paper characterizes the driver state along the five main dimensions--called here "(sub)states"--of drowsiness, mental workload, distraction, emotions, and under the influence. The polychotomous view of DM is presented through a pair of interlocked tables that relate these states to their indicators (e.g., the eye-blink rate) and the sensors that can access each of these indicators (e.g., a camera). The tables factor in not only the effects linked directly to the driver, but also those linked to the (driven) vehicle and the (driving) environment. They show, at a glance, to concerned researchers, equipment providers, and vehicle manufacturers (1) most of the options they have to implement various forms of advanced DM systems, and (2) fruitful areas for further research and innovation.